Home | Projects | Notes > ARM Cortex-M3/M4 Processor > Interrupt Priority & Priority Configuration
Interrupt Priority & Priority Configuration
Interrupt Priority
Priority means "urgency"
Priority number is a measure of urgency. It represents how urgent it is compared to others.
For ARM Cortex Mx processors, lesser the priority value, higher the priority
e.g., PV-1 has higher priority than PV-100
Sometimes, the term "priority" is used interchangeably with "priority value".
e.g., "The priority value of IRQ0 is 4"
Different Priority Levels
Priority values are also called as priority levels.
How many different priority levels are there in ARM Cortex Mx processor?
e.g., STM32F4x MCU has 16 different priority levels
e.g., TI TM4C123Gx has 8 different priority levels
ARM Cortex Mx processors have total 60 Interrupt Priority Registers. They are part of NVIC register set.
By using these registers you can configure priority levels for interrupts (IRQs) only. (You cannot use these registers to configure the priorities of system exceptions. Use System Handler Priority Registers.
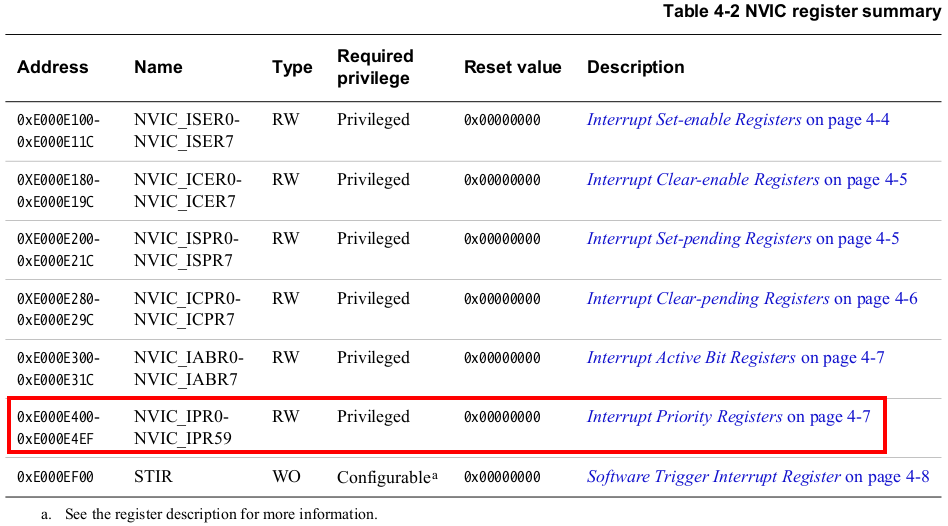
Each 32-bit Interrupt Priority Register can control 4 IRQs. (60 registers
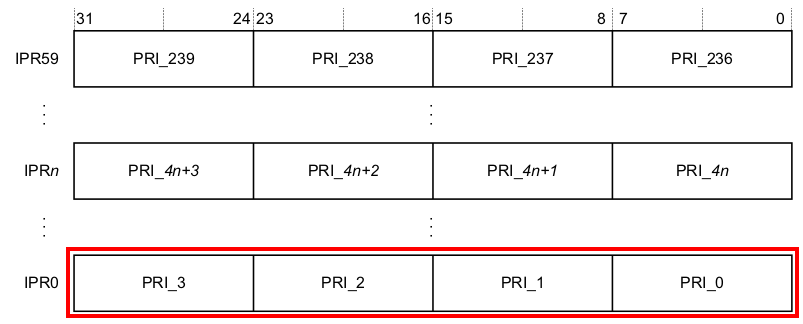
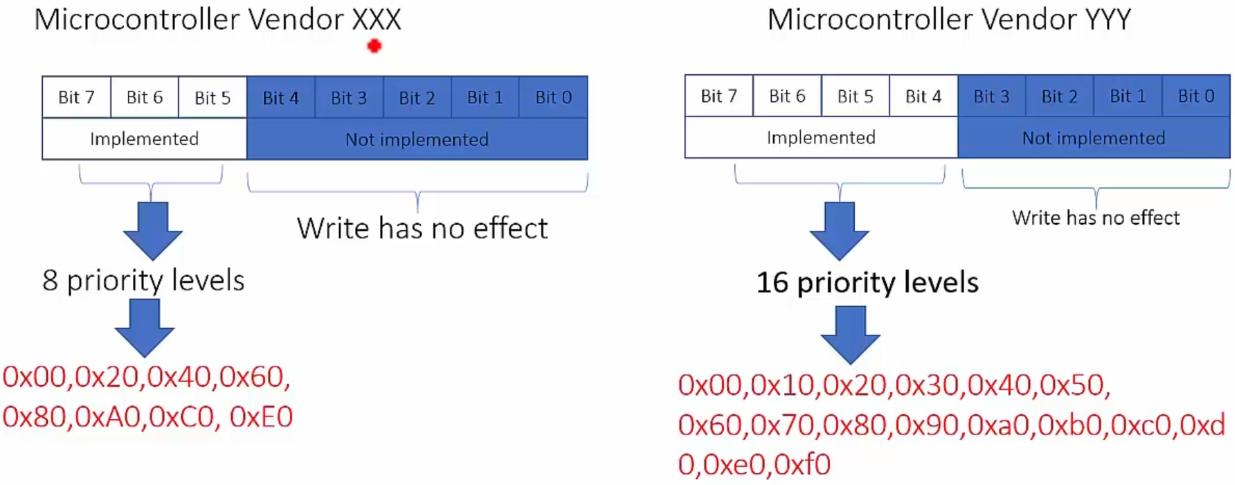
8 bits are assigned for each IRQ priority setting, but in general not all 8 bits are used:
If the MCU vendor decides to implement only 3 bits
If the MCU vendor decides to implement only 4 bits
Priority Grouping (Preempt Priority & Sub Priority)
Priority Grouping
Preempt priority
When the processor running interrupt handler, and another interrupt appears, then the preempt priority values will be compared, and interrupt with higher preempt priority (smaller value) will be allowed to run.
Sub priority
This value is used only when two interrupts with the same preempt priority values occur at the same time. In this case, the exception with higher sub-priority (smaller value) will be handled first.
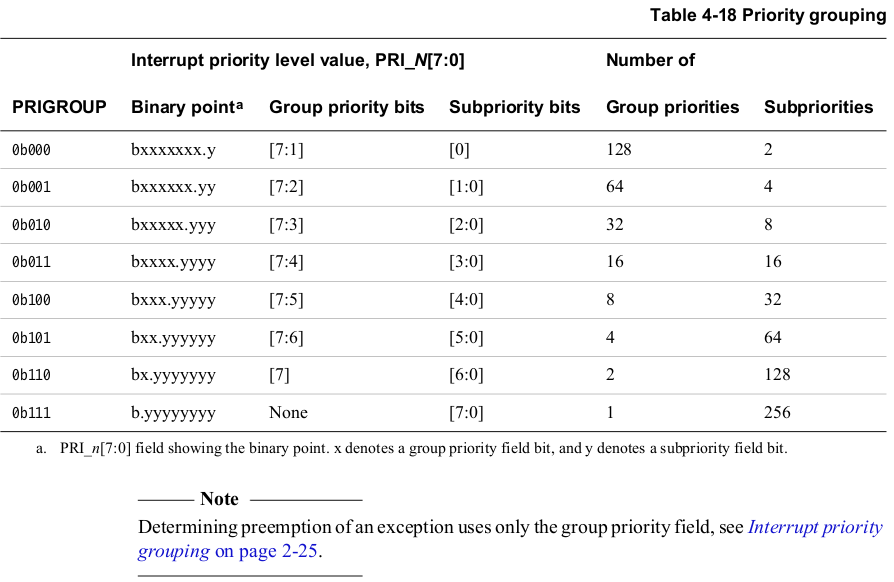
In the following table, the priority group is 0 by default. In this case, the 7 most significant bits are used for "Preempt priority" and the rest 1 bit is used for "Sub priority".
The priority group can be set by using the Application Interrupt And Reset Control Register which is part of the System Control Block (SBC).
Interrupt priority conflict resolution:
If two interrupts of the same preempt priority hit the processor at the same time
If the sub priority also happens to be the same
Priority Grouping Case Study
Assumption: Only 3 most significant bits are implemented in each Priority Level Register
Case 1: Priority group = 0
Preempt priority width = 7 bits (128 programmable priority levels)
But, only 3 bits are implemented. So, 8 programmable priority levels.
Sub priority width = 1 (2 programmable sub priority levels)
But, bit 0 is not implemented. So, no sub priority levels.
Case 2: Priority group = 5
Preempt priority width = 2 bits (4 programmable priority levels)
Only 3 bits are implemented. So, still 4 programmable priority levels.
Sub priority width = 6 (64 programmable sub priority levels)
But, only one bit (bit 5) out of those 6 bits is implemented. So, 2 sub priority levels.
Pending Interrupt Behavior
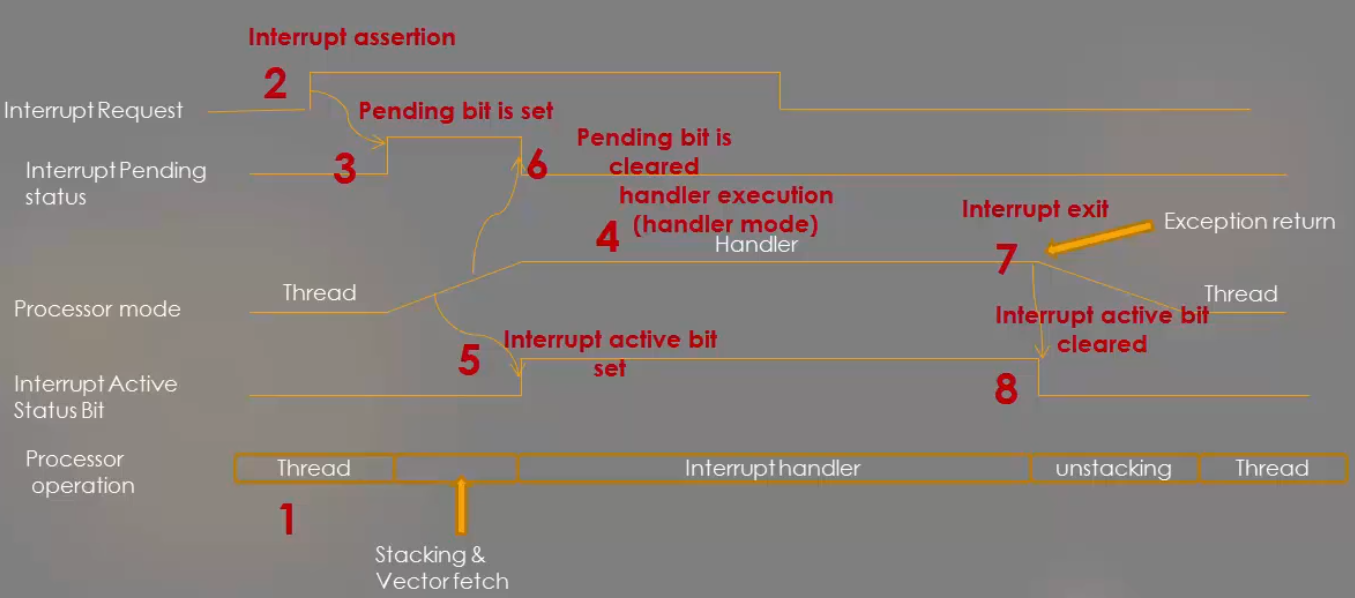
Case 1: Single Pended Interrupt
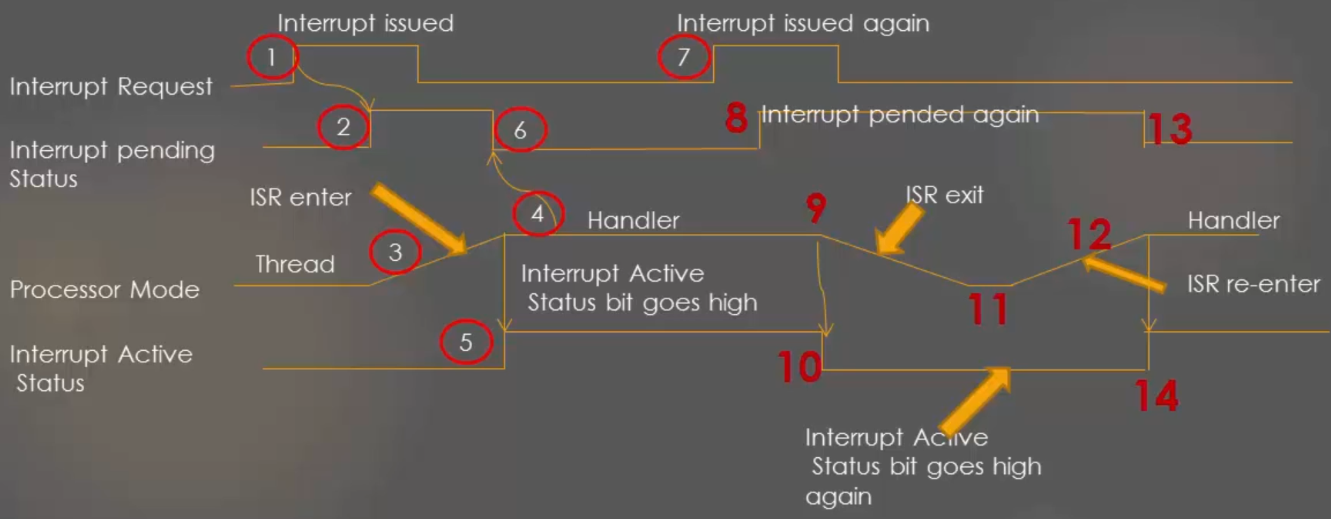
Case 2: Double Pended Interrupt
Exercise
Generate the below peripheral interrupts using NVIC interrupt pending register and observe the execution of ISRs when priorities are same and different. (Consult the interrupt vector table in Reference Manual of the microcontroller.)
TIM2 global interrupt
I2C1 event interrupt
xxxxxxxxxx611234567891011121314uint32_t *pNVIC_IPRBase = ADDR_NVIC_IPR_BASE; // Interrupt Priority Register base addr15uint32_t *pNVIC_ISERBase = ADDR_NVIC_ISER_BASE; // Interrupt Set-Enable Register base addr16uint32_t *pNVIC_ISPRBase = ADDR_NVIC_ISPR_BASE; // Interrupt Set-Pending Register base addr1718void configure_priority_for_irqs(uint8_t irq_no, uint8_t priority_value)19{20// First, find out IPR to use ( / )21uint8_t iprx = irq_no / 4;22uint32_t *ipr = pNVIC_IPRBase + iprx;2324// Second, find out the bit position to set( % -> x8)25uint8_t pos = irq_no % 4 * 8;2627// configure the priority28*ipr &= ~(0xFF << pos); // clear29*ipr |= (priority_value << pos);30}3132int main(void)33{34// 1. Configure the priority for the peripherals. (This always has to be done prior to35// (enableing the interrupt.)36configure_priority_for_irqs(IRQNO_TIMER2, 0x80);37configure_priority_for_irqs(IRQNO_I2C1, 0x80);38// 2. Manually set the interrupt pending bit in the NVIC Priority Register.39*pNVIC_ISPRBase |= (1 << IRQNO_TIMER2);4041// 3. Enable the IRQs in NVIC ISER42*pNVIC_ISERBase |= (1 << IRQNO_I2C1);43*pNVIC_ISERBase |= (1 << IRQNO_TIMER2);4445/* Loop forever */46for(;;);47}4849// ISR for TIMER250void TIM2_IRQHandler(void)51{52printf("TIM2_IRQHandler\n");53*pNVIC_ISPRBase |= (1 << IRQNO_I2C1); // introduce IRQ3154while (1);55}5657// ISR for I2C158void I2C1_EV_IRQHandler(void)59{60printf("I2C1_EV_IRQHandler\n");61}L36, L37: When we configure both interrupts' preempt priority to the same value, the previously invoked
TIM2_IRQHandler()will not be preempted by the incoming "I2C1 event interrupt" because "TIM2 global interrupt" has the smaller IRQ number.I2C1_EV_IRQHandler()will never be invoked.L37: When we configure "I2C1 event interrupt"s preemt priority to the smaller value than that of "TIM2 global interrupt"s, e.g., 0x70, then we can see that "I2C1 event interrupt" preempts the previously invoked
TIM2_IRQHandler()and executesI2C1_EV_IRQHandler(). WhenI2C1_EV_IRQHandler()returns,TIM2_IRQHandler()will execute again and tries to finish whatever task it has left.This situation is referred to as the "nested interrupts".
References
Nayak, K. (2022). Embedded Systems Programming on ARM Cortex-M3/M4 Processor [Video file]. Retrieved from https://www.udemy.com/course/embedded-system-programming-on-arm-cortex-m3m4/