Home | Projects | Notes > ARM Cortex-M3/M4 Processor > Scheduling & Context Switching
Scheduling & Context Switching
Scheduling
An algorithm which makes the decision of preempting a running task from the CPU and makes the decision about which task to dispatch (i.e., allocate CPU) next
The decision could be based on many factors such as system load, the priority of tasks, share resource access, or a simple Round-Robin method.
Preemptive Scheduling
Definition
The OS (or RTOS) can interrupt a currently running task and switch to another task based on priority or time slice.
Example
If a high-priority task becomes ready while a lower-priority task is running, the CPU will immediately switch to the high-priority task.
Use Cases
Real-time systems (e.g., RTOS), multitasking environments, responsive systems, etc.
Pros
Better responsiveness to high-priority events.
Fairer CPU time distribution in time-sharing systems.
Cons
Requires context switching, which adds overhead.
More complex to implement.
Non-Preemptive (Cooperative) Scheduling
Definition
Once a task starts running, it runs to completion (or until it yields the CPU voluntarily).
Example
A running task must finish or explicitly give up control for another task to run.
Use Cases
Simple embedded systems, cooperative multitasking, deterministic systems, etc.
Pros
Simpler and less overhead (no forced context switches).
Easier to reason about in terms of timing and resource usage.
Cons
Poor responsiveness to high-priority events.
Risk of CPU being hogged by poorly-behaved tasks.
Context switching
The procedure of switching out the currently running task from the CPU after saving the task's execution context or state and switching in the next task's to run on the CPU by retrieving the past execution context or state of the task.
State of a task
Inside a microcontroller (e.g., STM32x) is a processor (e.g., ARM Cortex-M4) which contains NVIC, MPU, SCP, FPU, Debug Unit, etc.
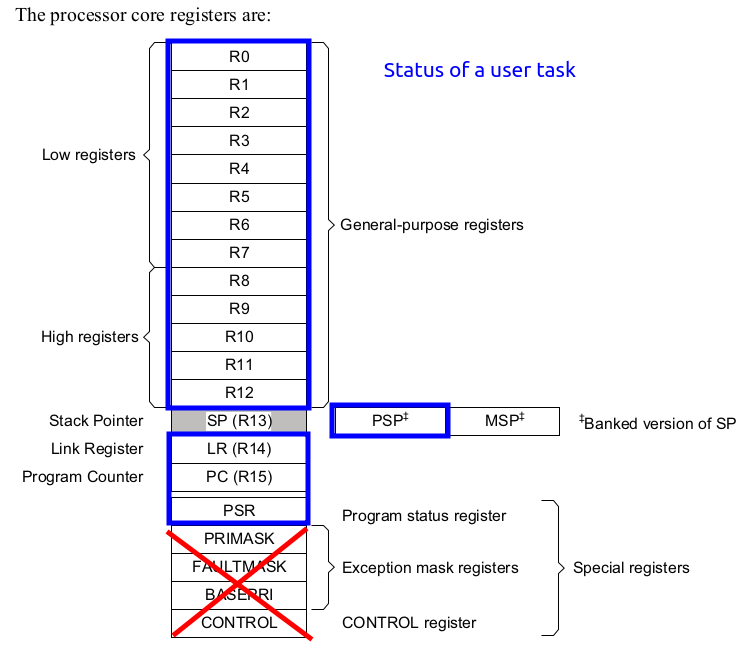
Inside a processor is a processor core which contains ALU, Core registers (General purpose, special purpose, special registers, etc.), etc.
When a task is running, there will be various resources associated with it that contains the information about the task. In general, the state of a process = "General purpose registers "+ "Some special purpose registers" + "Status register". These are what need to be stored and retrieved during the context switching.
General purpose registers
PC - Will be holding the next instruction the preempted task needs to execute when it is dispatched again.
LR - Return address
PSP - Stack pointer for the user tasks (contains information about how each task is using the stack)
In RTOS environment MSP is used to keep track of kernel's stack usage.
PSR - Snapshot of the status flags (N, V, Z, C, etc.)
Other special registers such as PRIMASK, FAULTMASK, BASEPRI, CONTROL registers are privileged registers and they will NOT be stored! (Most of the time user tasks will be running with unprivileged access level so storing these registers wouldn't make any sense. Kernel should touch these registers not the user tasks.)
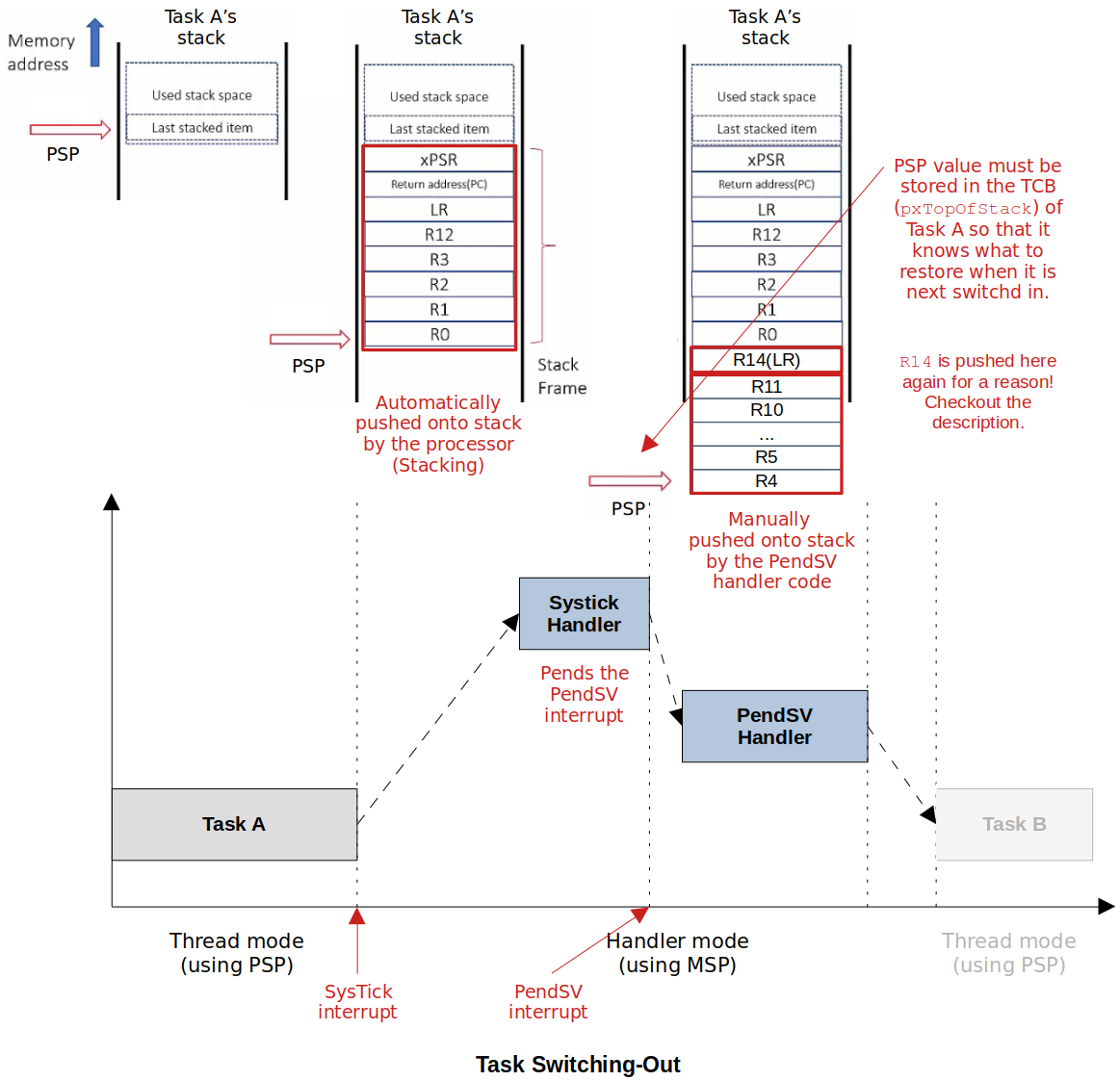
As an exception entry sequence, the following registers will get pushed onto stack automatically by the processor:
R0, R1, R2, R3, R12, LR, PC, xPSR (we'll call it Stack Frame 1 or SF1)
So, our job in implementing scheduler is to make sure that the rest of the task state will get pushed onto stack as well.
R4 - R11 (we'll call it Stack Frame 2 or SF2)
Note that R14(LR) needs to be pushed onto stack. Check out Context Switching to see why!
The following "Task Switching In/Out" diagram is taken from FreeRTOS notes.
Task's stack area initialization and storing of dummy stack frame
Each task can consume a maximum of 1 KB of memory as a private stack.
This stack is used to hold tasks' local variables and context (SF1 + SF2)
When a task is getting scheduled for the very first time, it doesn't have any context. So, it is the programmer's responsibility to store dummy SF1 and SF2 in the task's stack area as a part of "Task initialization" sequence before launching the scheduler.
Set all the general purpose registers to 0 (R0 - R12)
PSR - 0x01000000
Only the T bit is important (bit[24]) and it must be set (1) for ARM Cortex-M4
PC - Address of the
task2_handler()make sure that lsb of the address is 1; for T bit.LR - A special value EXC_RETURN which controls the exception exit.
0xFFFFFFFD is appropriate for our design. (Return to Thread mode, exception return uses non-floating-point state from the PSP and execution uses PSP after return.)
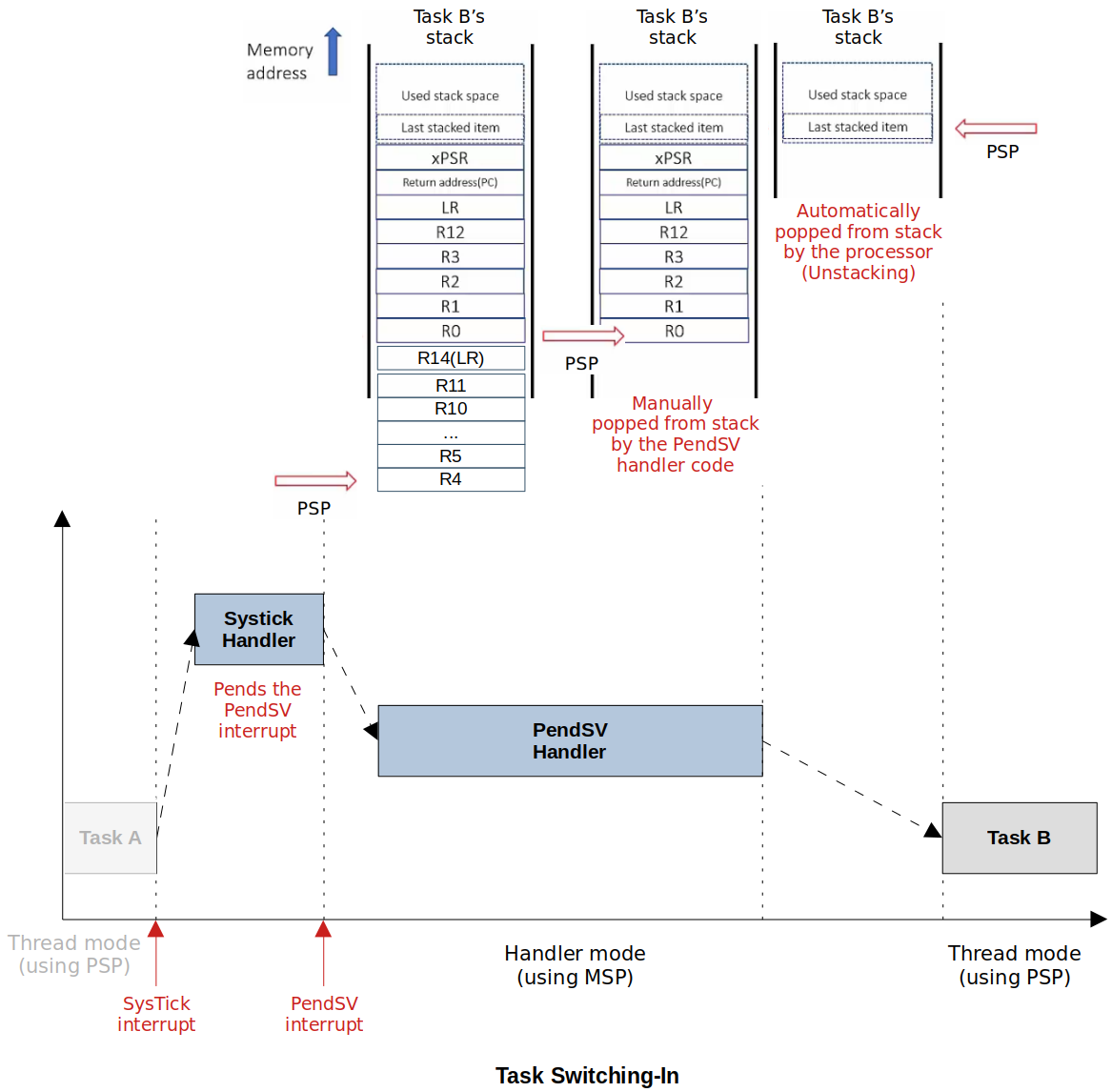
Case Study
Case study of context switching: T1 switching out, T2 switching in
Running T1
Scheduler (Context Switching)
Context saving
pushthe context of T1 onto T1's private stackSave the PSP value of T1 using a global variable
Context retrieving
Retrieve the PSP value of T2 from the corresponding global variable
popthe context of T2 from T2's private stack
Run T2
References
Nayak, K. (2022). Embedded Systems Programming on ARM Cortex-M3/M4 Processor [Video file]. Retrieved from https://www.udemy.com/course/embedded-system-programming-on-arm-cortex-m3m4/