Home | Projects | Notes > Computer Architecture & Organization > The Stack & Data Storage
The Stack & Data Storage
The Stack & Data Storage
These are High Order Language (HOL) constructions that are discussed in the programming class and the Programming Languages course. The CPU hardware, ISA and OS needs to support these constructs.
Assembly programmers are not directly related.
Binding
Binding is an association of a variable name with a storage location. This can be a register or main memory location. Binding can happen as soon as compile-time and as late as run-time. Other times binding can happen - link time, program load time, any various times during the code execution.
Static allocation is when binding happens at compile-time. e.g., In C/C++
xxxxxxxxxx21const double pi = 3.14159;2const double sqrroot2 = 1.4142;These variables do NOT change. The compiler can allocate and initialize a memory location.
Dynamic allocation is when binding happens at run-time. e.g., In C/C++
xxxxxxxxxx11ptr = (int*)malloc(100 * sizeof(int));Compiler does not know how much memory to allocate or what values it will take on. It has to defer to the OS to do this ar run-time.
Scope
Scope defines the range of the variable's visibility or accessibility within a program. In assembly, you have access to all registers, everything you have defined in the
.datasection at all times so the concept of scope doesn't apply.xxxxxxxxxx211int main(int argc, char *argv[])2{3{4int x = 20, y = 30;5{6printf("x = %d, y = %d\n", x, y);7{8int y = 40;910x++;11y++;1213printf("x = %d, y = %d\n", x, y);14}1516printf("x = %d, y = %d\n", x, y);17}18}1920return 0;21}xxxxxxxxxx31x = 20, y = 302x = 21, y = 413x = 21, y = 30Lifetime
As programs run variables will come into existence, be used for a while and go away. The memory can be reallocated to new variables as the program executes. "Memory leaks" happen when memory that is no longer required is not released properly. Too many memory leaks leads to not having enough memory to run the program efficiently. The CPU and OS has to assume you need that memory and manages it that way.
COBOL and FORTRAN requires only static allocations and bindings happen at compile-time. Because of this these programming languages do not allow recursion. Programmers can work around this but have to keep track of all that stuff themselves.
What Does All This Mean To The Hardware?
Needs to support a stack
Can be just a stack pointer (SP) register or a specialized piece of hardware.
Also need to have instructions to handle the stack (
pushandpop).
Addressing modes need to support pointer-type addressing.
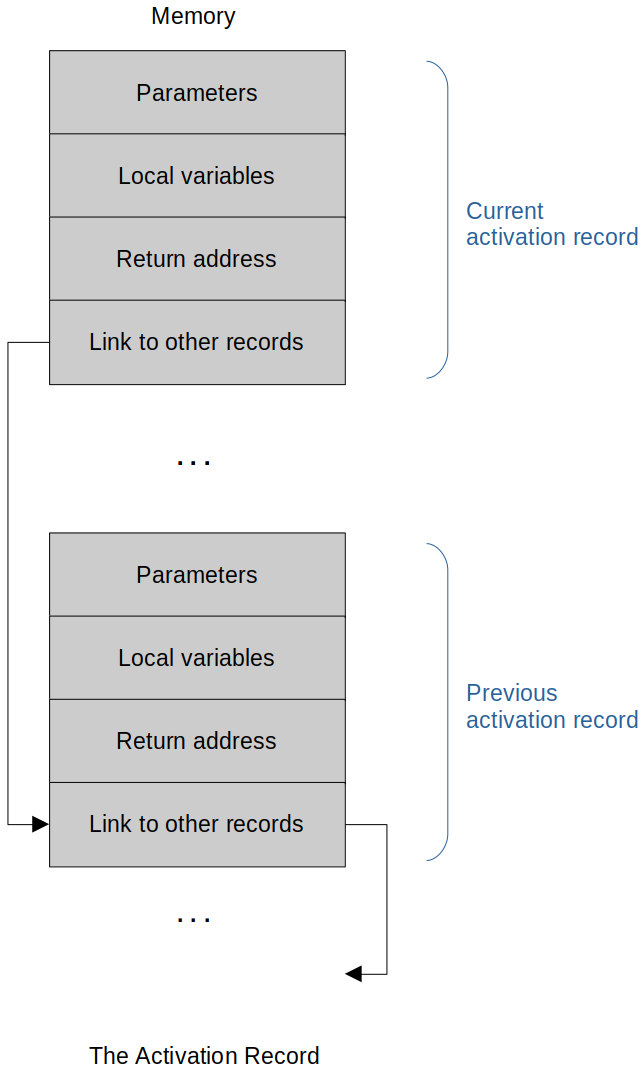
Activation Record
Activation Record - used for languages that uses dynamic data storage - is a data structure that contains all the information necessary to execute a procedure (function). This allocation is done at runtime.
This has to do with HOL. This is not applicable when it comes to the ARM assembly programming since you know where everything is.
Activation record is also called a frame.
In Operating Systems this is "like" the Process Control Block.
Activation record contains:
Parameters (passed values)
Local variables
Return address
Link to other records
Required memory allocation (storage) is done at runtime.
When the procedure (function) is no longer needed, the memory is freed-up for the next activation record.
This is happening on virtual memory which is a pure software.
But, the hardware needs to support the implementation of the construct to make this more efficient.
Stack Pointer
Always points to the top of the stack and is not affected when activation records are created or freed.
Frame Pointer
Specific to a created frame (activation record) and point to the address of the base of the current stack frame.
This imples that any memory references within the activation record are all offsets to the frame pointer.
ARM resiger
r11is used for the Frame Poiner. (Can also putfpinstead and the assembler will know that it isr11)
The Stack Frame and Local Variables
Procedures (functions) have to have a local workspace to store the passed arguments or local variables to do its job.
It is allocated to the precedure (function) when it runs and freed-up (returned back to the OS for later use) when it stops running.
"Local" means that the workspace is private to the procedure and is never accessed by the calling program or by other functions.
If a procedure is to be made reentrant (multiple invocations can run safely concurrently) or used recursively (the function calls itself), its local variables must be bound up not only with the procedure itself, but with the occasion of its use.
If there is no issue while jumping to the interrupt handler and coming back to where it was, we refer to that procedure as "reentrant".
In general, recursion is avoided in embedded systems since it uses a lot of memories to create stack frames.
Two concepts associated with dynamic storage techniques:
Stack Frame
Temporary storage allocated at the top of the current stack. The stack frame generally includes the following components:
Argument variables passed onto the stack (any arguments that were not passed by the registers?)
Local variables (in High Order Languages)
Saved copies of any registers modified by the subprogram that need to be restored (e.g.,
$s0-$s8inMAL).The return address
Since the stack frame for a given subprogram has a fixed size, we can reduce the number of instructions required to push and pop it by only updating the stack pointer once. Instead of individual pushes and pops, we can use offset addressing.
Frame Pointer
Points to the bottom of the stack frame or the old Stack Pointer before the allocation for the new stack frame. This allows the Stack Pointer and Frame Pointer to operate independent of each other so that changing one does not change the other.
The stack pointer will change when a subprogram does a push or pop operation. Many subprograms do this during calculations for convenience, or to implement algorithms that use a stack.
When this happens, the offset addresses representing local automatic variables such as 4(
$sp) are no longer valid. The offsets are computed by the compiler, and hard-coded as offset-mode operands in the instructions, so they cannot be easily changed while the program is running.One way to alleviate this problem is by using the frame pointer. The frame pointer is another register that we set to the address of the stack frame when a subprogram begins executing. If the code refers to local variables as offsets from the frame pointer instead of offsets from the stack pointer, then the program can use the stack pointer without complicating access to auto variables. We would then refer to something in the stack frame as offset (
$fp) instead of offset ($sp).
Register Indirect Addressing with Offset can be used to access the local variables in the Stack Frame.
d-byte stack is used for the procedure's local variables.
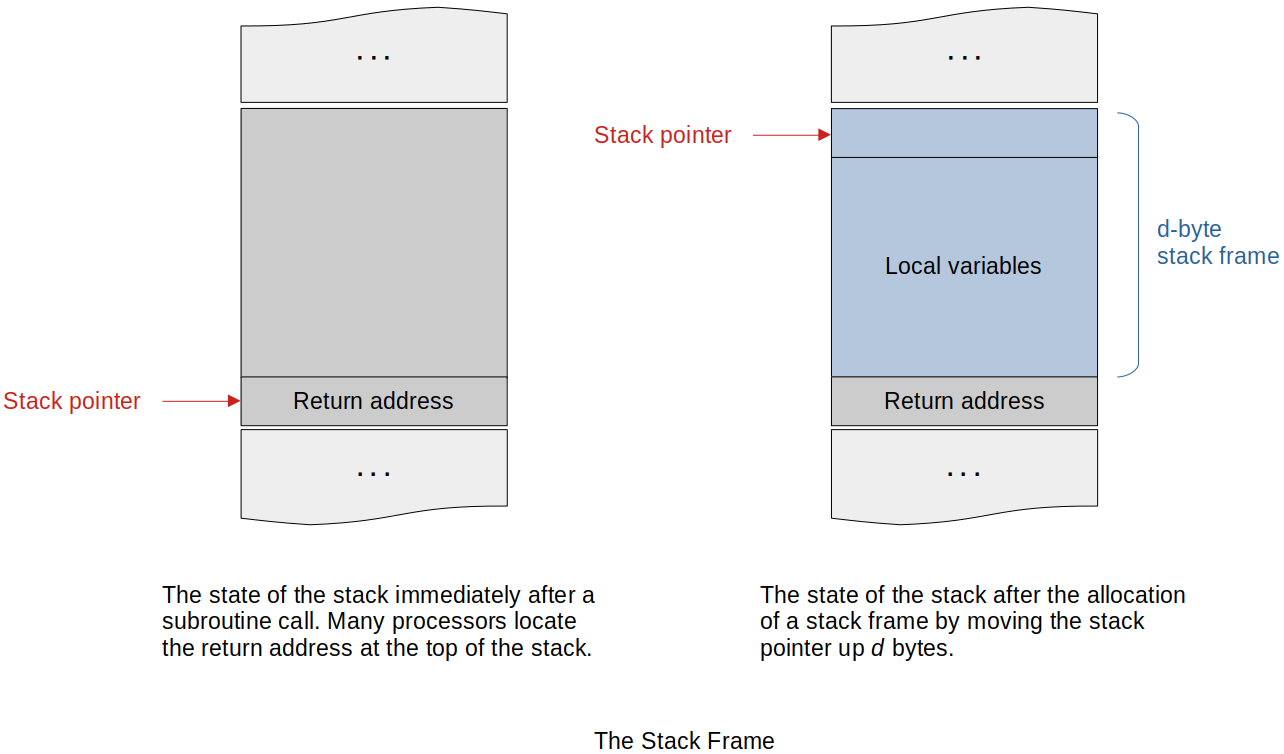
Because the stack grows towards the low end of memory, the stack pointer is decremented to create a stack frame.
e.g., Reserving
100bytes of memory is achieved by:xxxxxxxxxx11SUB r13, r13, #100 @ move the stack pointer up 100 bytesBefore a return from subroutine is made, the stack-frame is collapsed by restoring the stack pointer with
xxxxxxxxxx11ADD r13, r13, #100
In general, operations on the stack are balanced; that is, if you put something on the stack frame you have to remove it.
IF this does not happen your program more than likely will break.
Consider the following simple example of a procedure.
xxxxxxxxxx71Proc:2SUB r13, r13, #16 @ move the stack pointer up 16 bytes3...4STR r1, [r13, #8] @ store something in the frame 8 bytes below TOS5...6ADD r13, r13, #16 @ adios stack frame7MOV pc, r14 @ exit subroutine, restore the PC to returnTemporary variables on a stack frame can be accessed using the stack pointer.
CISCs maintain a hardware SP that is automatically adjuted when a
BSRorRTSis executed.RISC (e.g., ARM) uses a register
r13(they have plenty) as the programmer maintained stack pointer by convention.The stack pointer always points to the top of the stack for the ARM (the last item pushed on the stack or the next item to be popped off the stack.
The frame pointer points to the base of the current stack frame.
The stack pointer may change during the execution of the procedure, but the frame pointer will not change.
Data in the stack frame may be accessed with respect to either the stack pointer or the frame pointer.
By convention,
r11is used as a frame pointer in ARM environements andA6in 68K environments.
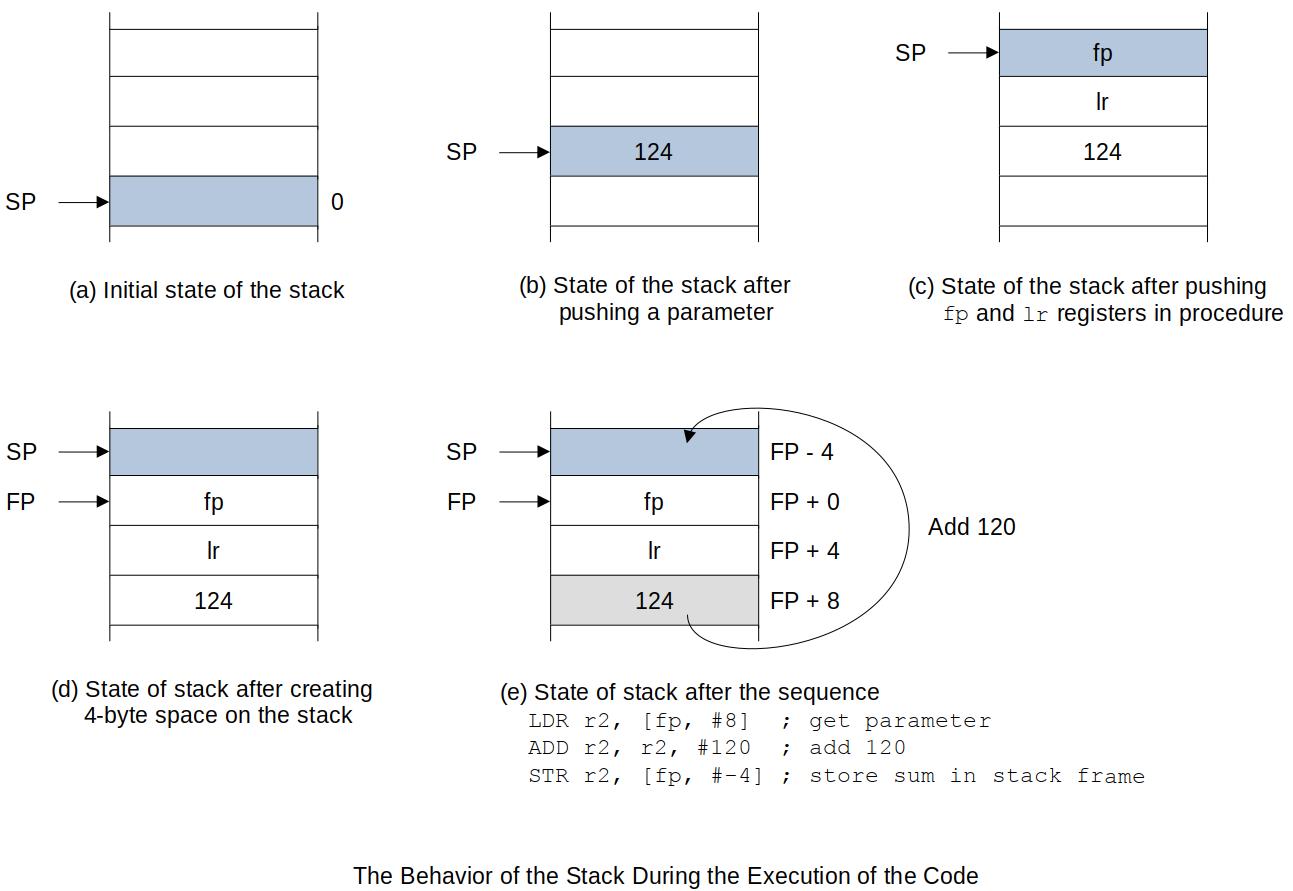
Example of an ARM Processor Stack Frame
An example ARM code that shows how to setup and manage the Stack Frame.
xxxxxxxxxx261AREA TestProg, Code, READONLY2ENTRY ; This is the calling environement3; subroutine code is not shown in this example4; dummy values are used in tracing the code56Main ADR sp, Stack ; set up r13 as the stack pointer7MOV r0, #124 ; set up a dummy parameter in r08MOV fp, #123 ; set up dummy frame pointer9STR r0, [sp, #-4] ; retrieve the data10Loop B Loop ; wait here (endless loop)11Sub STMFD sp!, {fp, lr} ; push frame-pointer and link-register12MOV fp, sp ; frame pointer at the bottom of the frmae13SUB sp, sp, #4 ; create the stack frame (one word)14LDR r2, [fp, #8] ; get the pushed parameter (effective addr = fp + offset)15ADD r2, r2, #120 ; do a dummy operation on the parameter16STR r2, [fp, #-4] ; store it in the stack frame17ADD sp, sp, #4 ; clean up the stack frame18LDMFD sp!, {fp, pc} ; restore frame pointer and return1920DCD 0x0000 ; clear memory21DCD 0x0000 ; clear memory22DCD 0x0000 ; clear memory23DCD 0x0000 ; clear memory24Stack DCD 0x0000 ; start of the stack2526ENDOn the Raspberry Pi, use
PUSHandPOPinstead ofSTMFDorLDMFDinstructions. (Load/Store multiple registers)