Home | Projects | Notes > Linux Device Drivers > Linux Kernel Module (LKM)
Linux Kernel Module (LKM)
Linux Kernel Module
Objectives:
Write a simple hello world kernel module
Compile the kernel module using
kbuildTransfer a kernel module to BBB board, load and unload
Linux Kernel Module (LKM)
Linux supports dynamic insertion and removal of code from the kernel while the system is up and running. The code we add and remove at run-time is called a kernel module. (In other words, a LKM is like a plug-in to the running Linux kernel.)
Once the LKM is loaded into the LInux kernel, you can start using new features and functionalities exposed by the kernel module without even restarting the device.
LKM dynamically extends the functionality of the kernel by introducing new features to the kernel such as security, device drivers, file system drivers, system calls etc. (modular approach)
Support for LKM allows your embedded Linux systems to have only minimal base kernel image (less run-time storage) and optional device drivers and other features are supplied on demand via module insertion.
Example: when a hot-pluggable new device (e.g., USB drive) is inserted, the device driver (i.e., LKM) gets loaded automatically to the kernel.
Static & Dynamic LKMs
When building the kernel, modules can be directly linked into the kernel (i.e., static), or built as independent modules that can be loaded/unloaded into/from the kernel at run-time (i.e., dynamic).
Static (y)
When you build a Linux kernel, you can make your module statically linked to the kernel image (module becomes part of the final Linux kernel image). This method increases the size of the final Linux kernel image. Since the module is "built-int" into the Linux kernel image, you cannot "unload" the module. It occupies the memory permanently during run-time.
Increases the size of the Linux kernel image.
Dynamic (m)
When you build a Linux kernel, these modules are NOT built into the final kernel image, and rather they are compiled and linked separately to produce
.kofiles. You can dynamically load and unload these modules from the kernel using user space programs such asinsmod,modprobe, andrmmod.
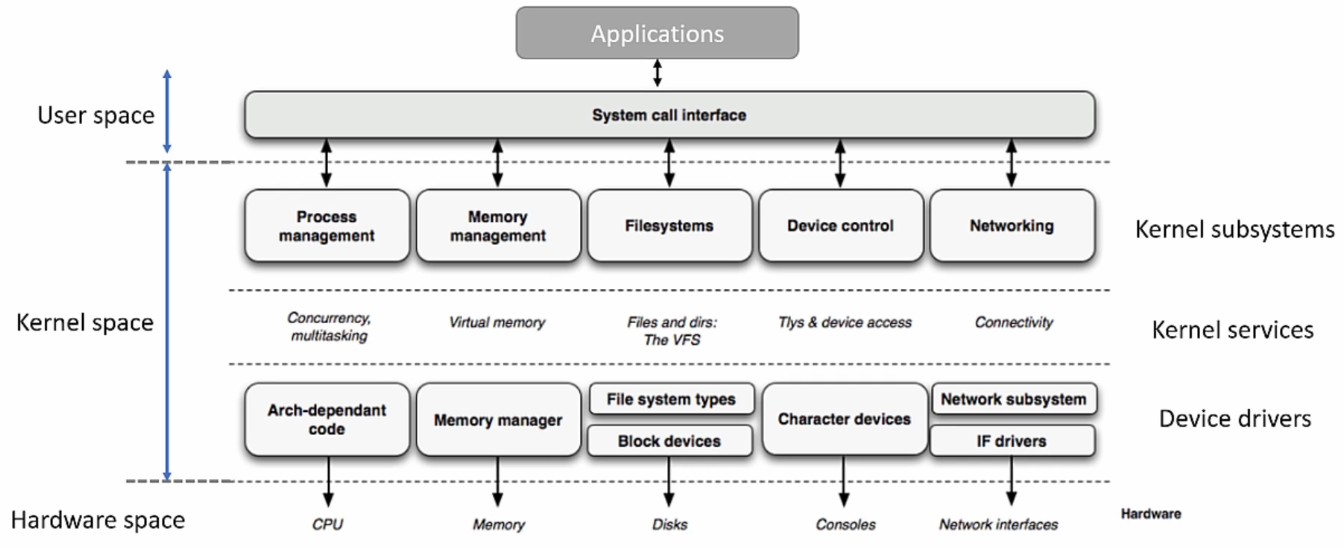
User Space vs. Kernel Space
User space (Restricted mode) - User-level programs
Kernel space (Privileged mode) - Kernel-level code (e.g., Linux kernel, subsystems and LKMs)
Linux Kernel Module (LKM) Structure
Since LKMs are the code running in kernel space, there are certain rules to follow when writing one.
Sections of an LKM:
Header
Code
Registration
Module description
Header
This section lists the header files to include.
xxxxxxxxxx41/*****************************************************************************************2* INCLUDE (Inclusion of the necessary header files)3****************************************************************************************/4Every kernel module must include the header file
linux/module.h. It provides various macros for writing kernel modules.All the kernel header files can be found in the kernel source tree
LINUX_SRC/include/linux.Kernel header vs. User-space header
Since kernel modules are to be executed in the kernel space, kernel headers must be used. Do NOT include any user-space library headers like C standard library header files (e.g.,
stdio.h).No user-space library is linked to the kernel module.
Most of the relevant kernel headers can be found in
linux_source_bse/include/linux/.
Code
This section implements what the kernel module should do.
Code section contains 2 entry points:
Module initialization function (or entry point)
Prototype:
int fun_name(void);Must return a value:
0 on success
Non-zero on module initialization failure where the module will not get loaded in the kernel.
This is an entry point to your module.
In the case of static modules, this function will get called during the boot-time.
In the case of dynamic modules, this function will get called during the module insertion time.
There must be one module initialization entry point in every kernel module.
What it typically does:
Initialization of devices
Initialization data structures private to devices
Requesting memory dynamically for various kernel data structures and services
Request for allocation of major-minor numbers
Device file creation
The module initialization function is module-specific and should never be called from other modules of the kernel. It should not provide any services or functionalities which may be requested by other modules. Hence, it makes sense to make this function private using
staticthough it is optional to do so.
Module clean-up function (or entry point)
Prototype:
int fun_name(void);This is an entry point when the module gets removed
Since a static module cannot be removed at run-time, clean-up function will get called only in the case of a dynamic module when it gets removed by using the user space command such as
rmmod.If you write a module and you are sure that it will always be statically linked to the kernel, then it is not necessary to implement this function.
Even if your static module has a clean-up function, the kernel build system will remove it during the build process if there is an
__exitmarker.What it typically does:
In general, it is the reverse operation of the module initialization function; undoing init function.
Free the memory requested by the init function
De-init the device or leave the device in the "proper state"
Example:
xxxxxxxxxx221/*****************************************************************************************2* CODE (Implementation of what the module does)3****************************************************************************************/45/* Module initialization entry point */6static int __init helloworld_init(void)7{8/* Kernel's printf */9pr_info("Hello world!\n");10/* 'pr_info()' is a wrapper function for 'printk()'. */1112return 0;13/* Module load will be successful only when the module init entry14point function returns 0. If it returns non-zero value for any reason,15loading the module will be unsuccessful. */16}1718/* Module clean-up entry point */19static void __exit helloworld_exit(void)20{21pr_info("Good bye world!\n");22}Function section attributes:
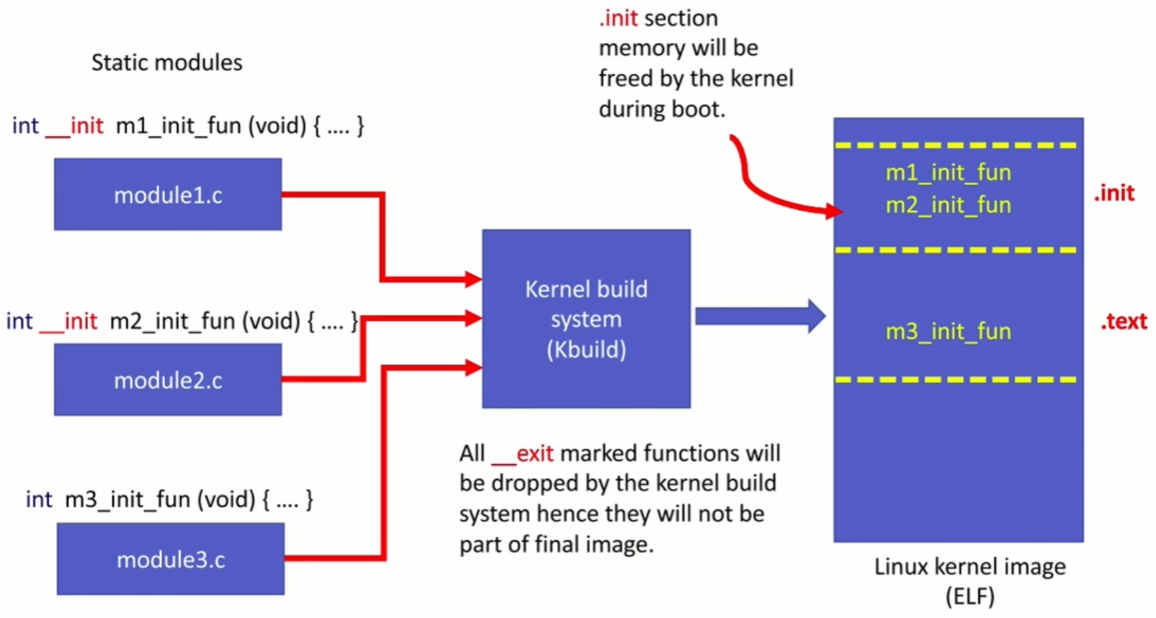
__initxxxxxxxxxx3123__section(.init.xxx)- Compiler directives, which direct the compiler to keep data or code in the output section.init.__initand__exitmakes sense only for static modules (built-in modules)__initis a macro which will be translated into a compiler directive, which instructs the compiler to put the code in.initsection of the final ELF of the Linux kernel image..initsection will be freed from memory by the kernel during boot-time once all the initialization functions get executed.Since the built-in driver cannot be unloaded, its init function will not be called again until the next reboot. This means that it's not necessary to keep references to the init function after its execution. So, using the
__initmacro is a technique, when used with a function, to make the kernel free the code memory of that function after its execution.Similarly, you can use
__initdatawith variables that will be dropped after the initialization.__initdataworks similar to__initbut it works for init "variables" rather than functions.
__exitxxxxxxxxxx11__section(.exit.xxx)- Compiler directives, which direct the compiler to keep data or code in the output section.exit.For the built-in modules, clean-up function is not required. So, when the
__exitmacro is used with a clean-up function, the kernel build system will exclude the function during the build process.
Registration
Module entry point registration example:
xxxxxxxxxx51/*****************************************************************************************2* REGISTRATION (Registration of entry points with kernel)3****************************************************************************************/4module_init(helloworld_init);5module_init(helloworld_exit);These are the macros used to register the module's init and clean-up functions with the kernel.
Here,
module_init/module_exitare NOT functions, but are macros defined inlinux/module.h.module_init()macro will add its argument to the init entry point database of the kernel.module_exit()macro will add its argument to exit entry point database of the kernel.
Module Description
Module description example:
xxxxxxxxxx71/*****************************************************************************************2* MODULE DESCRIPTION (Descriptive information about the module)3****************************************************************************************/4MODULE_LICENSE("GPL"); /* This module adheres to the GPL licensing */5MODULE_AUTHOR("Kyungjae Lee");6MODULE_DESCRIPTION("A simple kernel module to pring Hello World");7MODULE_INFO(board, "BeagleBone Black REV A5");MODULE_LICENSEis a macro used by the kernel module to announce its license type. If you load a module whose license parameter is a non-GPL(General Public License), then the kernel triggers warning of being tainted. This is the way of the kernel letting the users and developers know it's a non-free license based module.The developer community may ignore the but reports you submitted after loading the proprietary-licensed module.
The declared module license is also used to decide whether a given module can have access to the small number of "GPL-only" symbols in the kernel.
Go to
include/linux/module.hto find out what are the allowed parameters which can be used with this macro to load the module without tainting the kernel.You can see the module information by running the following command on the
.kofile:xxxxxxxxxx11arm-linux-gnueabihf-objdump -d -j .modinfo helloworld.ko