Home | Projects | Notes > MCU Peripheral Drivers > I2C Application 1: Master Tx (Blocking) (i2c_01_master_tx_blocking.c)
I2C Application 1: Master Tx (Blocking)(i2c_01_master_tx_blocking.c)
Requirements
I2C master (STM32 Discovery board) and I2C slave (Arduino board) communication.
When the button on the STM32 board (master) is pressed, the master shall send data to the Arduino board (slave). The data received by the Arduino board shall be displayed on the serial monitor terminal of the Arduino IDE.
Use I2C SCL = 100 kHz (i.e., standard mode)
Use external pull-up resistors (3.3 kΩ) for SDA and SCL line
[!] Note: If you don't have external pull-up resistors, you can also try activating the STM32 I2C pin's internal pull-up resistors.
External Pull-Up Resistance Calculation
According to the I2C specification:
Parts Needed
Arduino board
STM32 board
Logic level converter
Breadboard and jumper wires
2 pull-up resistors of resistance 3.3 kΩ or 4.7 kΩ (You can also use internal pull-up resistors of the pins in place of external resistors.)
Q: We calculated the Rp(max) to be 3 kΩ. If 3 is the max, then why would 3.3 or 4.7 kΩ resistors work? Wouldn't these be higher resistance than the max? Is there a tolerable range? If so, how do I find this range?
A: Rp(max) refers to the maximum recommended value for the pull-up resistor. If the calculated Rp(max) is 3kOhms, it means that the manufacturer or standard recommends using a pull-up resistor with a value equal to or lower than 3kOhms for reliable operation.
However, using a resistor with a slightly higher value, such as 3.3kOhms or 4.7kOhms, is generally acceptable in practice. The bus capacitance and other factors in the system design can influence the actual pull-up resistor value that works reliably. As long as the chosen resistor value is close to the recommended range and the overall system performance is satisfactory, using 3.3kOhms or 4.7kOhms resistors should be fine.
It's important to note that selecting a pull-up resistor with a significantly higher value than Rp(max) may lead to slower rise times and increased susceptibility to noise or signal integrity issues. On the other hand, choosing a resistor with a significantly lower value may result in excessive current flow and power dissipation. Therefore, it's generally best to stay within the recommended range while considering the specific requirements and constraints of the system.
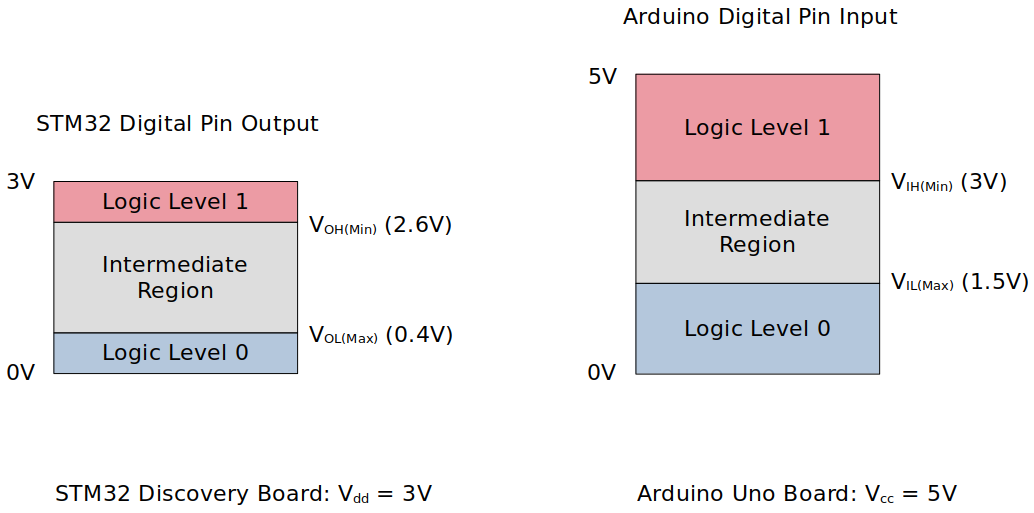
STM32 Board and Arduino Board Communication Interfaces

STM32 Board and Arduino Board Voltage Levels
To work around the voltage level difference, a logic level shifter will be necessary.
Setup
1. Find out the GPIO pins that can be used for IC2 communication
For this application, I2C communication lines SCL, SDA will be used. Find out the GPIO pins over which I2C can communicate! Look up the "Alternate function mapping" table in the datasheet.
I2C1_SCL
I2C1_SDA
Although, in the documentation, it is said that PB9 can be used as I2C1_SDA, some interference has been detected while testing due to the hardware circuitry called "SWIM" so ended up using PB7 instead.
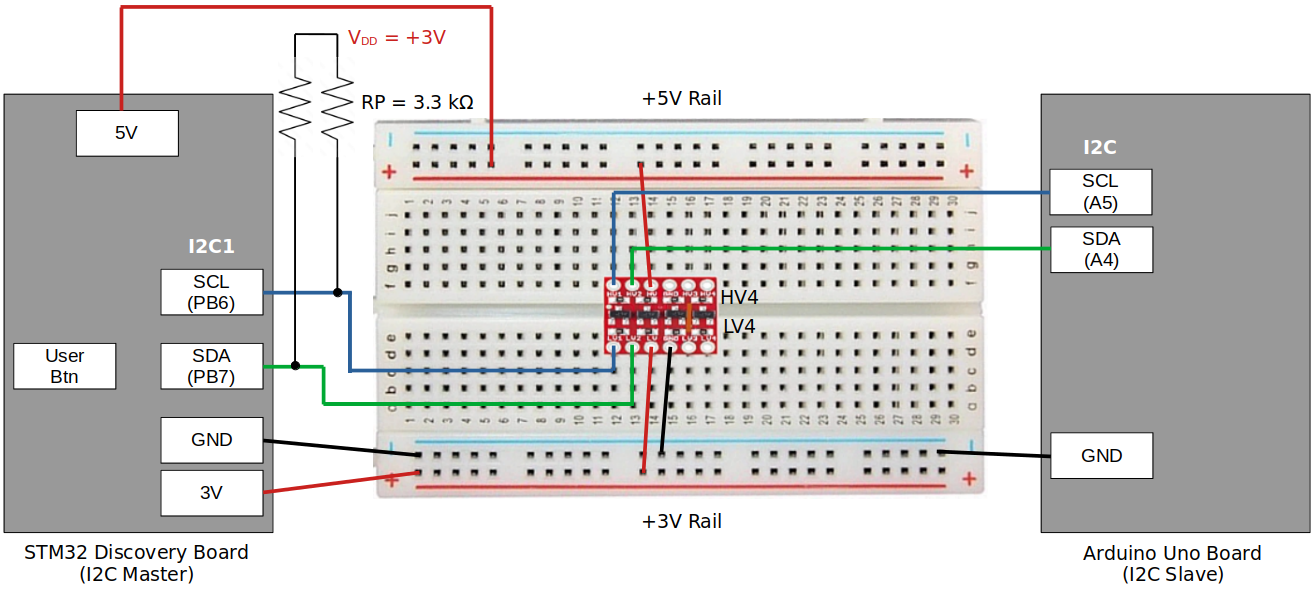
2. Connect STM32 Discovery board with Arduino Uno board I2C pins
Be careful not to directly supply 5 volts to the STM32 board pins when the board is not powered up as they may be damaged. When the logic level shifter is used, you don't need to worry about this issue.
To analyze the communication with the logic analyzer, connect the channels as follows:
CH0 - SCL
CH1 - SDA
GND - Common GND of the bread board
3. Power Arduino board and download SPI slave sketch to Arduino
Sketch name:
001I2CSlaveRxString.inoYou don't need to write an application for Arduino board. It is already provided as a sketch.
As soon as you download this sketch to the Arduino board, it will operate as a slave.
Code
i2c_01_master_tx_blocking.c
Path: Project/Src/
xxxxxxxxxx1611/*******************************************************************************2 * File : i2c_01_master_tx_blocking.c3 * Brief : Program to test I2C master's (blocking) Tx functionality4 * Author : Kyungjae Lee5 * Date : Jun 12, 20236 ******************************************************************************/7
8/**9 * Pin selection for I2C communication10 *11 * I2C1_SCL - PB6 (AF4)12 * I2C1_SDA - PB7 (AF4)13 */14
15/* strlen() */16
18/* Check Arduino IDE serial monitor */20/* STM32 Discovery board is master */21
22/* Global variables */23I2C_Handle_TypeDef I2C1Handle;24
25/**26 * delay()27 * Brief : Spinlock delays the program execution28 * Param : None29 * Retval : None30 * Note : N/A31 */32void delay(void)33{34 /* Appoximately ~200ms delay when the system clock freq is 16 MHz */35 for (uint32_t i = 0; i < 500000 / 2; i++);36} /* End of delay() */37
38/**39 * I2C1_PinsInit()40 * Brief : Initializes and configures GPIO pins to be used as I2C1 pins41 * Param : None42 * Retval : None43 * Note : N/A44 */45void I2C1_PinsInit(void)46{47 GPIO_Handle_TypeDef I2CPins;48
49 I2CPins.pGPIOx = GPIOB;50 I2CPins.GPIO_PinConfig.GPIO_PinMode = GPIO_PIN_MODE_ALTFCN;51 I2CPins.GPIO_PinConfig.GPIO_PinOutType = GPIO_PIN_OUT_TYPE_OD;52 I2CPins.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_PIN_PU;53 I2CPins.GPIO_PinConfig.GPIO_PinAltFcnMode = 4;54 I2CPins.GPIO_PinConfig.GPIO_PinSpeed = GPIO_PIN_OUT_SPEED_HIGH;55
56 /* SCL */57 I2CPins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_6;58 GPIO_Init(&I2CPins);59
60 /* SDA */61 I2CPins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_7;62 GPIO_Init(&I2CPins);63} /* End of I2C1_PinsInit */64
65/**66 * I2C1_Init()67 * Brief : Creates an SPI2Handle initializes SPI2 peripheral parameters68 * Param : None69 * Retval : None70 * Note : N/A71 */72void I2C1_Init(void)73{74
75 I2C1Handle.pI2Cx = I2C1;76 I2C1Handle.I2C_Config.I2C_ACKEnable = I2C_ACK_ENABLE;77 I2C1Handle.I2C_Config.I2C_DeviceAddress = MY_ADDR;78 /* Since STM32 board is master, I2C_DeviceAddress field does not have79 * to be configured. However, you can assign some dummy value to it if80 * you wanted to. When selecting the dummy address value, make sure to81 * avoid using the reserved addresses defined in the I2C specification.82 */83 I2C1Handle.I2C_Config.I2C_FMDutyCycle = I2C_FM_DUTY_2;84 I2C1Handle.I2C_Config.I2C_SCLSpeed = I2C_SCL_SPEED_SM;85
86 I2C_Init(&I2C1Handle);87} /* End of I2C1_Init */88
89/**90 * GPIO_ButtonInit()91 * Brief : Initializes a GPIO pin for button92 * Param : None93 * Retval : None94 * Note : N/A95 */96void GPIO_ButtonInit(void)97{98 GPIO_Handle_TypeDef GPIOBtn;99
100 /* Zero-out all the fields in the structures (Very important! GPIOLed and GPIOBtn101 * are local variables whose members may be filled with garbage values before102 * initialization. These garbage values may set (corrupt) the bit fields that103 * you did not touch assuming that they will be 0 by default. Do NOT make this104 * mistake!105 */106 memset(&GPIOBtn, 0, sizeof(GPIOBtn));107
108 /* GPIOBtn configuration */109 GPIOBtn.pGPIOx = GPIOA;110 GPIOBtn.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_0;111 GPIOBtn.GPIO_PinConfig.GPIO_PinMode = GPIO_PIN_MODE_IN;112 GPIOBtn.GPIO_PinConfig.GPIO_PinSpeed = GPIO_PIN_OUT_SPEED_HIGH; /* Doesn't matter */113 //GPIOBtn.GPIO_PinConfig.GPIO_PinOutType = GPIO_PIN_OUT_TYPE_PP; /* N/A */114 GPIOBtn.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_PIN_NO_PUPD;115 /* External pull-down resistor is already present (see the schematic) */116 GPIO_Init(&GPIOBtn);117} /* End of GPIO_ButtonInit */118
119
120int main(int argc, char *argv[])121{122 /* Create data to send123 * (The Arduino sketch is written using the Arduino Wire library. The wire124 * library has limitation on how many bytes can be transferred or received125 * in single I2C transaction and the limit is 32 bytes. So, don't126 * send/receive more than 32 bytes in a single I2C transaction. You may want127 * to split it into multiple I2C transactions in such cases.)128 */129 uint8_t data[] = "I2C master Tx testing\n";130
131 /* Initialize GPIO pin for button */132 GPIO_ButtonInit();133
134 /* Initialize I2C pins */135 I2C1_PinsInit();136
137 /* Configure I2C peripheral */138 I2C1_Init();139
140 /* Enable I2C peripheral */141 I2C_PeriControl(I2C1, ENABLE);142
143 /* Wait for button press */144 while (1)145 {146 /* Wait until button is pressed */147 while (!GPIO_ReadFromInputPin(GPIOA, GPIO_PIN_0));148
149 /* Introduce debouncing time for button press */150 delay();151
152 /* Send data to slave153 * Note: 'I2C_MasterTxBlocking()' API has been modified for handling154 * extended feature (i.e., repeated start) that are used155 * in the next level applications. Another parameter has been156 * added after @slaveAddr.157 * TODO: Update the following API call to make this application work!158 */159 //I2C_MasterTxBlocking(&I2C1Handle, data, strlen((char *)data), SLAVE_ADDR);160 }161} /* End of main */
Arduino Sketch (001I2CSlaveRxString.ino)
xxxxxxxxxx431// Wire Slave Receiver2//Uno, Ethernet A4 (SDA), A5 (SCL)3
5
7int LED = 13;8char rx_buffer[32] ;9uint32_t cnt =0;10uint8_t message[50];11void setup() {12
13 Serial.begin(9600);14 // Define the LED pin as Output15 pinMode (LED, OUTPUT);16 17 // Start the I2C Bus as Slave on address 0X6918 Wire.begin(MY_ADDR); 19 20 // Attach a function to trigger when something is received.21 Wire.onReceive(receiveEvent);22
23 sprintf(message,"Slave is ready : Address 0x%x",MY_ADDR);24 Serial.println((char*)message ); 25 Serial.println("Waiting for data from master"); 26}27
28void loop(void)29{30 31}32
33void receiveEvent(int bytes) 34{35 while( Wire.available() )36 {37 rx_buffer[cnt++] = Wire.read();38 }39 rx_buffer[cnt] = '\0';40 cnt=0;41 Serial.print("Received:"); 42 Serial.println((char*)rx_buffer); 43}