Home | Projects | Notes > Multi-Threading (POSIX Threads) > Thread Cancellation - Deferred Cancellation
Thread Cancellation - Deferred Cancellation
Deferred Cancellation
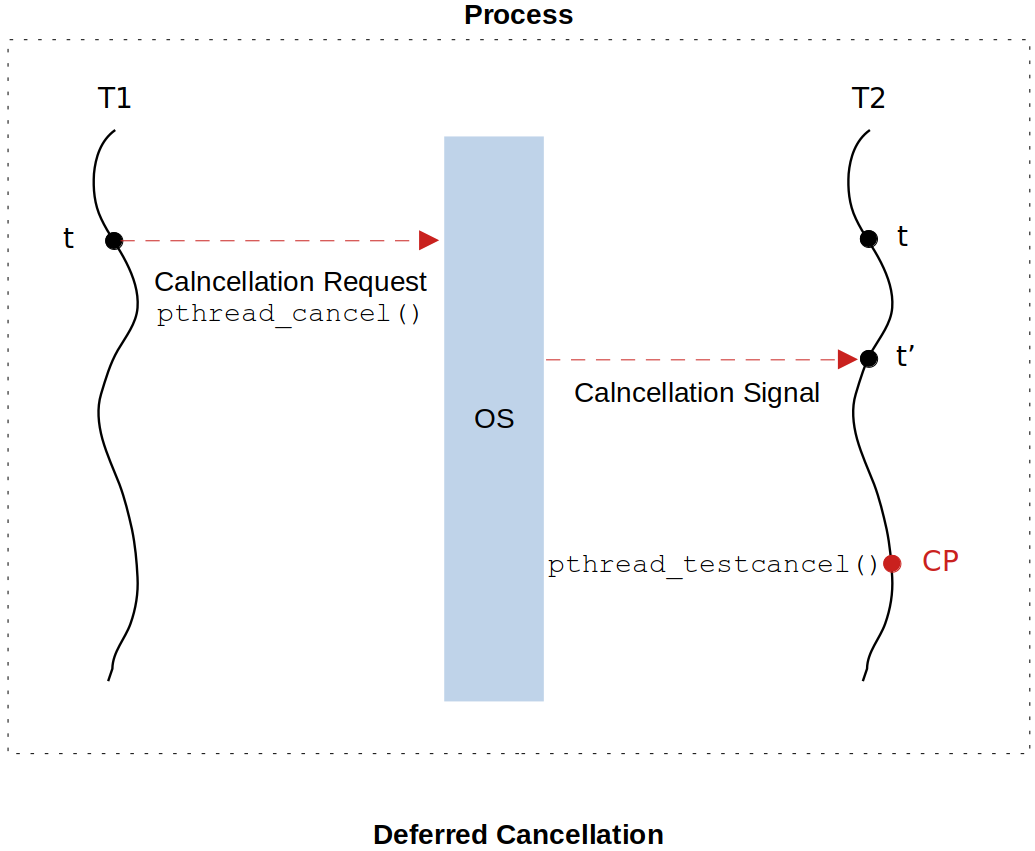
Deferred cancellation allows the programmer to control as to which points in the execution flow of the thread, the thread is allowed to be canceled (terminated).
It is contrary to asynchronous cancellation where thread could be canceled at any point in its execution flow.
Deferred cancellation is used to handle the problem of invariants caused by an abrupt termination of a thread while it is carrying out:
An operation to modify a data structure
A function call or a system call
If a thread gets canceled while it is in the middle of processing a system call whose execution takes place in the kernel space, then the kernel might get corrupted.
Asynchronous cancellation could not handle invariants issues!
Cancel signal can be delivered by the kernel to the target thread at any time, but it is processed only at the designated cancellation points of the target thread.
It is the programmer's responsibility to assign a cancellation point wisely so that when the thread terminates at its cancellation point no variants, resource leaks and deadlocks occur.
The API
pthread_testcancel()is used to do that. It tests if cancel signal is pending, and if yes, it invokes the cleanup handlers and then cancels (terminates) the thread.
Deferred Cancellation Demonstration
The only update made to the
asynchrnous_cancellation.cfile to turn it into a perfectly cancellation safedeferred_cancellation.cfile is the line 82; adding the cancellation point usingpthread_testcancel().xxxxxxxxxx1291/*2* File Name : deferred_cancellation.c3* Description : C program to demonstrate pthread deferred cancellation4* Author : Modified by Kyungjae Lee5* (Original: Abhishek Sagar - Juniper Networks)6* Date Created : 01/07/20237*/891011121314151617pthread_t slaves[N_SLAVES]; /* array of thread handles */1819/* thread cleanup handler to prevent resource (memory) leak */20void memory_cleanup_handler(void *arg)21{22printf("%s invoked...\n", __FUNCTION__);23free(arg);24}2526/* thread cleanup handler to prevent resource (file) leak */27void file_cleanup_handler(void *arg)28{29printf("%s invoked...\n", __FUNCTION__);30close((FILE*)arg);31}3233/* thread function */34void* write_into_file(void *arg)35{36char file_name[64];37char string_to_write[64];38int len;39int count = 0;4041/* set the thread eligible for cancellation */42pthread_setcancelstate(PTHREAD_CANCEL_ENABLE /* PTHREAD_CANCEL_DISABLE */, 0);43/* set cancellation mode to ASYNCHRONOUS */44pthread_setcanceltype(PTHREAD_CANCEL_DEFERRED, 0);45/* Notice that this two APIs do not take the thread handle as an argument. This46* implies that the thread that invokes these APIs can only affect itself. In47* other words, no thread can set the 'cancelstate' or the 'canceltype' of another48* thread. */4950int *thread_id = (int*)arg;5152/* register the cleanup handler for the dynamically allocated variable 'arg' */53pthread_cleanup_push(memory_cleanup_handler, arg);5455sprintf(file_name, "thread_%d.txt", *thread_id);5657FILE *fptr = fopen(file_name, "w");5859if(!fptr)60{61printf("Error : Could not open log file %s, errno = %d\n", file_name, errno);62pthread_exit(0); /* Make sure to terminate the program using this API so the cleanup handlers63can be invoked at the termination. Terminating using 'return' statement64will not invoke the cleanup handlers */65/* return 0; */66}6768/* register the cleanup handler for the opened file pointed to by 'fptr' */69pthread_cleanup_push(file_cleanup_handler, fptr);7071int a = 0;7273while(a < 20)74{75len = sprintf(string_to_write, "%d : I am thread %d\n", count++, *thread_id);76fwrite(string_to_write, sizeof(char), len, fptr);77fflush(fptr);78sleep(1);79a++;8081/* cancellation point (deferred cancellation) */82pthread_testcancel();83}8485/* pop the cleanup handlers out of stack */86pthread_cleanup_pop(1); /* arg (non-0: pop cleanup function and invoke it, 0: just pop) */87pthread_cleanup_pop(1);8889return 0;90}9192int main(int argc, char **argv)93{94int i;95int *thread_id = 0;9697for (i = 0; i < N_SLAVES; i++){98thread_id = calloc(1, sizeof(*thread_id));99*thread_id = i;100pthread_create(&slaves[i], 0, write_into_file, thread_id);101}102103/* main menu */104int choice;105int thread_num;106107while(1) {108109printf("1. Cancel the thread\n");110scanf("%d", &choice);111printf("Enter slave thread id [0-%d] :", N_SLAVES -1);112scanf("%d", &thread_num);113if(thread_num < 0 || thread_num >= N_SLAVES) {114printf("Invalid Thread id\n");115exit(0);116}117118printf("\n");119120switch(choice) {121case 1:122pthread_cancel(slaves[thread_num]);123break;124default:125continue;126}127}128return 0;129}
References
Sagar, A. (2022). Part A - Multithreading & Thread Synchronization - Pthreads [Video file]. Retrieved from https://www.udemy.com/course/multithreading_parta/