Home | Projects | Notes > Real-Time Operating Systems (RTOS) > ARM Cortex-M Interrupt Priority & FreeRTOS Task Priority
ARM Cortex-M Interrupt Priority & FreeRTOS Task Priority
Hardware Interrupt Priority (ARM Cortex-M)
Hardware priority is the priority values assigned to various interrupts (i.e., MCU-specific, external to the processor) and system exceptions (i.e., processor-specific, internal to the processor) of the processor.
Which of the lower or higher priority value means higher priority depends on the hardware design so you must check the documentation!!!
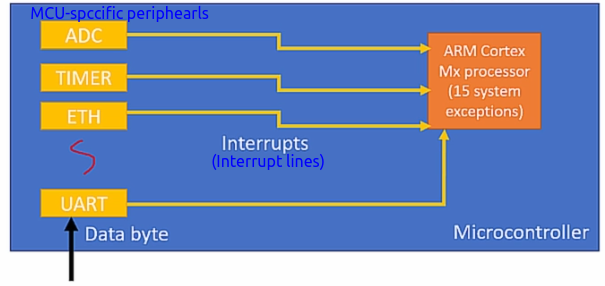
When an interrupt occurs, corresponding Interrupt Service Routine (ISR) or Interrupt Handler gets invoked and runs in the "Handler mode" of the processor.
ISR examples:
xxxxxxxxxx41static void adc_interrupt_handler(void)2{3/* Interrupt handling for ADC peripheral */4}xxxxxxxxxx41static void timer_interrupt_handler(void)2{3/* Interrupt handling for TIMER peripheral */4}xxxxxxxxxx41static void uart_interrupt_handler(void)2{3/* Interrupt handling for UART peripheral */4}
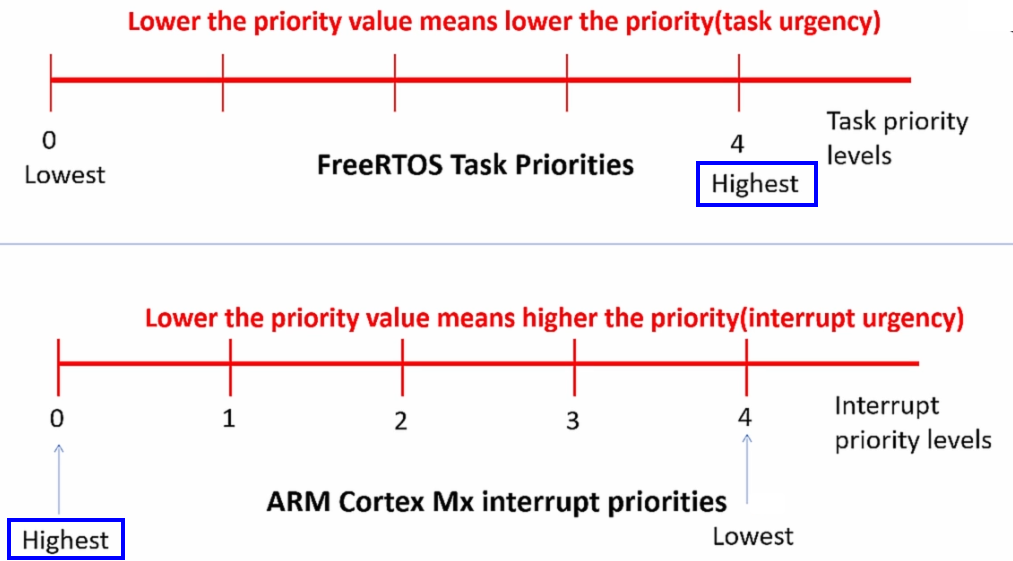
FreeRTOS Task Priority vs. ARM Cortex-M Interrupt Priority
Don't be confused! This is by DESIGN!
FreeRTOS Hardware Interrupt Configuration Items
In
FreeRTOSConfig.hare 2 hardware interrupt configuration items:configKERNEL_INTERRUPT_PRIORITYconfigMAX_SYSCALL_INTERRUPT_PRIORITY
configKERNEL_INTERRUPT_PRIORITY
This configuration item decides the priorities of the kernel interrupts. These interrupts (SysTick, PendSV, SVC) are set to the lowest possible priorities.
The kernel interrupts include:
SysTick exception (or interrupt)
e.g., Maintains the system tick
xxxxxxxxxx11PendSV exception (or interrupt)
e.g., Performs context switching
SVC exception (or interrupt)
e.g., Launches the very first user task
Definition
xxxxxxxxxx51/* FreeRTOSConfig.h */23/* Interrupt priorities used by the kernel port layer itself. These are generic4to all Cortex-M ports, and do not rely on any particular library functions. */5Kernel interrupts are assigned lowest possible priorities.
L5:
configLIBRARY_LOWEST_INTERRUPT_PRIORITYis defined as0xfin the same file.
What is the lowest and highest possible values in an ARM Cortex-M processor based microcontroller?
To answer this question, you need to know what the value of
__NVIC_PRIO_BITSCMCIS macro is.xxxxxxxxxx31/* Project/Drivers/CMSIS/Device/ST/STM32F4xx/Include/stm32f407xx.h */23/*!< STM32F4XX uses 4 Bits for the Priority Levels */4 bits
Priority register (0x00 is the highest priority) - Microcontroller-specific!
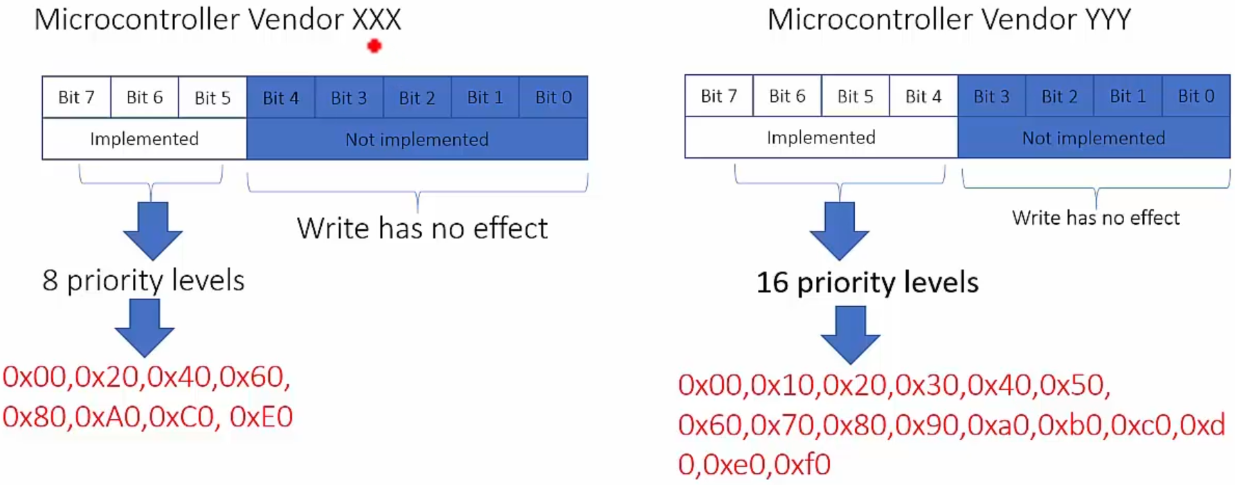
Therefore,
configKERNEL_INTERRUPT_PRIORITYwill be calculated to be0xf0, the lowest of the 16 priority levels possible. (Less urgency)
configMAX_SYSCALL_INTERRUPT_PRIORITY
In the newer version of FreeRTOS Port file, its name has been changed to
configMAX_API_CALL_INTERRUPT_PRIORITY.Decides the maximum priority level of those interrupts which use FreeRTOS APIs that end with
FromISR.The priority value of an interrupt that ends with
FromISRor an interrupt that calls an interrupt that ends withFromISRmust be greater (i.e., lower priority) than this macro value.Example (Do not assume ARM Cortex-M processor):
Here, in this example, the lower the priority value the lower the priority.
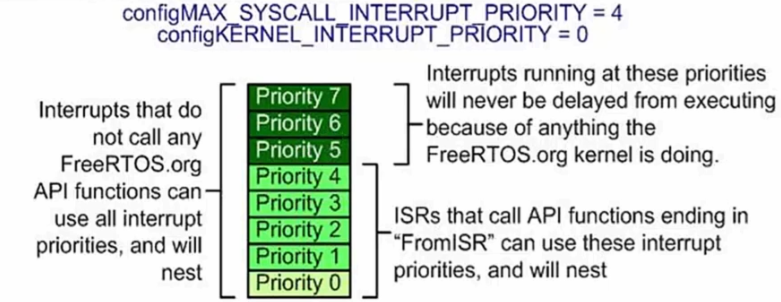
Interrupts that do not call FreeRTOS kernel API functions can execute at the priorities above
configMAX_SYSCALL_INTERRUPT_PRIORITYand therefore never be delayed by the RTOS kernel execution.Definition
xxxxxxxxxx51/* FreeRTOSConfig.h */23/* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!!4See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */5L5:
configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITYis defined as 5 in the same file, so5 << (8 - 4)equals 0x50.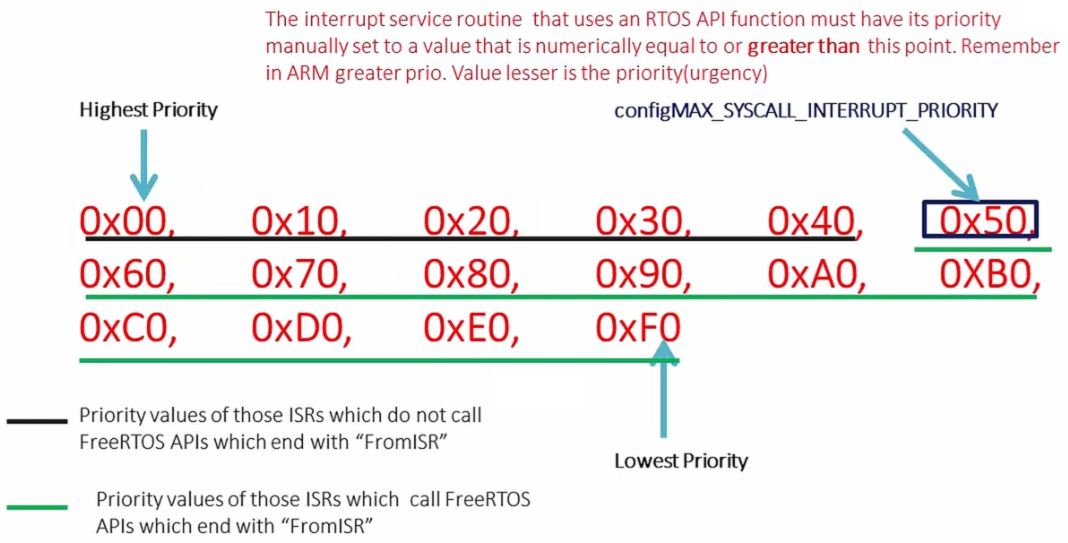
Conclusion
FreeRTOS APIs that end with
FromISRare interrupt-safe. But, even these APIs should NOT be called from the ISRs that are of lower priority value (i.e., higher priority) than the value defined byconfigLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY.Therefore, any ISR that uses an RTOS API function must have its priority value manually set to a value that is greater than or equal to the value defined by
configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY.ARM Cortex-M interrupts default to having a priority value of 0. This is the highest possible priority value. Therefore, NEVER leave the priority of an interrupt that uses the interrupt-safe RTOS API at its default value.
FreeRTOS FromISR APIs
FreeRTOS provides separate APIs for use from interrupt handlers. These APIs end with
FromISR.If a FreeRTOS API doesn't end with
FromISR, then it should not be used in an interrupt context (i.e., inside an ISR).For example:
xxxxxxxxxx61/* Task handler */2void led_red_handler(void *parameters)3{4while (1)5xQueueSend(); // cannot use 'xQueueSendFromISR()'6}xxxxxxxxxx51/* Interrupt handler */2void uart_interrupt_handler(void)3{4xQueueSendFromISR(); // cannot use 'xQueueSend()'5}See FreeRTOS
FromISRAPIs for more details.
References
Nayak, K. (2022). Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging [Video file]. Retrieved from https://www.udemy.com/course/mastering-rtos-hands-on-with-freertos-arduino-and-stm32fx/