Home | Projects | Notes > Real-Time Operating Systems (RTOS) > Exercise: FreeRTOS FromISR & Task Priority (06_LED_Button_ISR, 07_Task_Priority)
Exercise: FreeRTOS FromISR & Task Priority (06_LED_Button_ISR, 07_Task_Priority)
Exercise: FreeRTOS FromISR (06_LED_Button_ISR)
Problem Statement
Implement ISR-to-task notification using direct notification APIs of FreeRTOS.
Create 3 tasks that toggle 3 different LEDs of the STM32F407 Discovery board.
Upon the button press, the button interrupt handler must run, and it should send the notification to the current LED toggling task.
When LED toggling task receives the notification, it should delete itself.
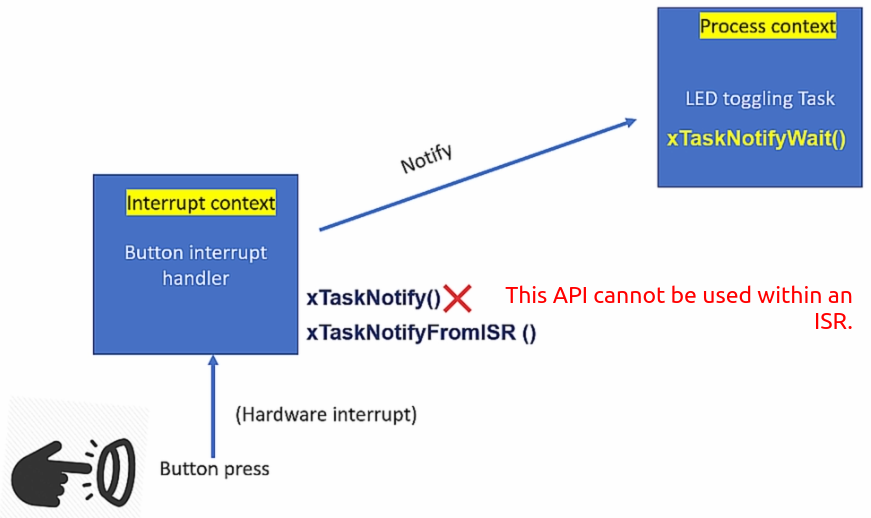
Since we are using the interrupt handler which runs in the Handler Mode (interrupt context) unlike in the previous exercise where the button task ran in the Thread Mode (process context), we need to use the different version of task notification API. That is, the
xTaskNotifyFromISR().
Project Setup
Go through all the process you went through to setup the Exercise: 005_LED_Task_Notify.
Do the following GPIO configuration.
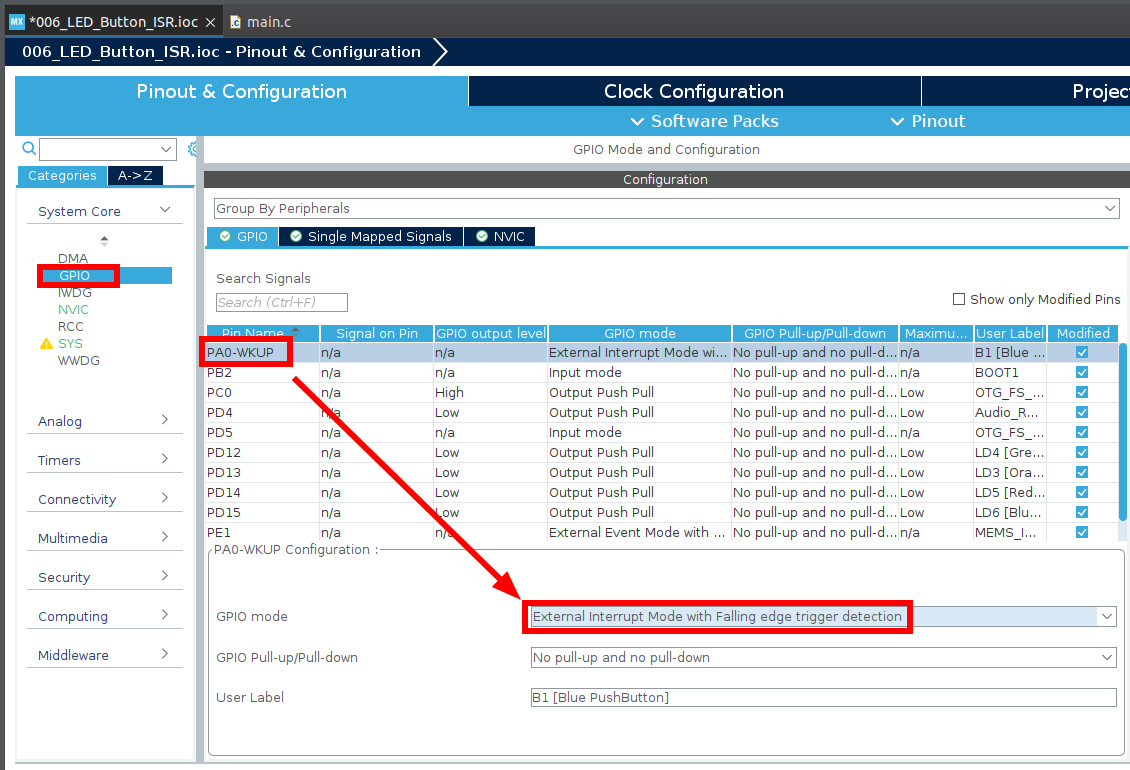
GPIO
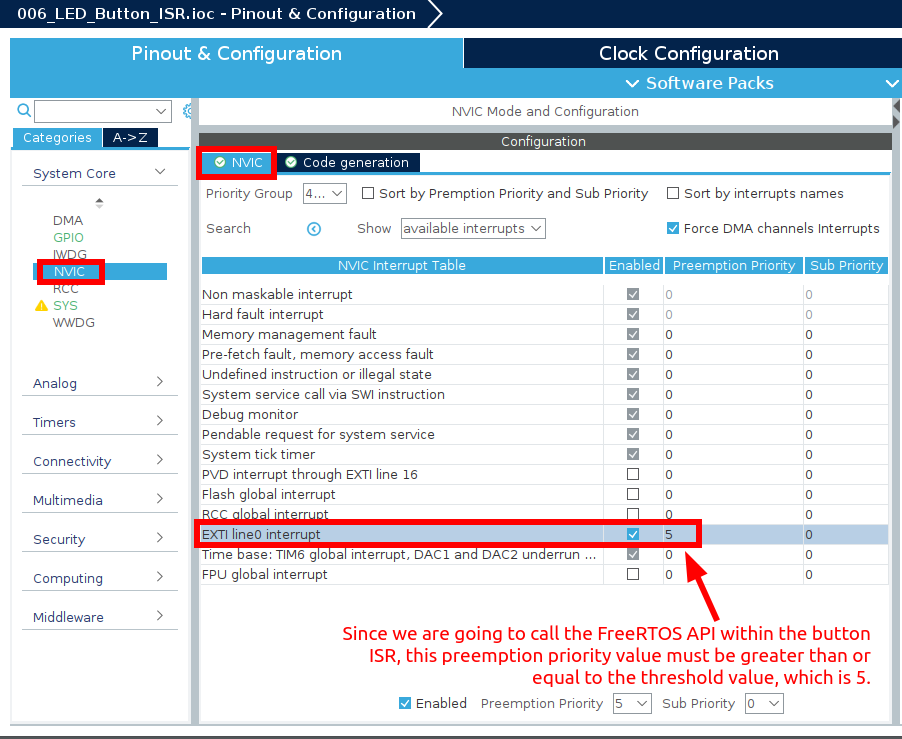
PA0is connected toEXTI line0 interrupt. So do the following setup.
Call
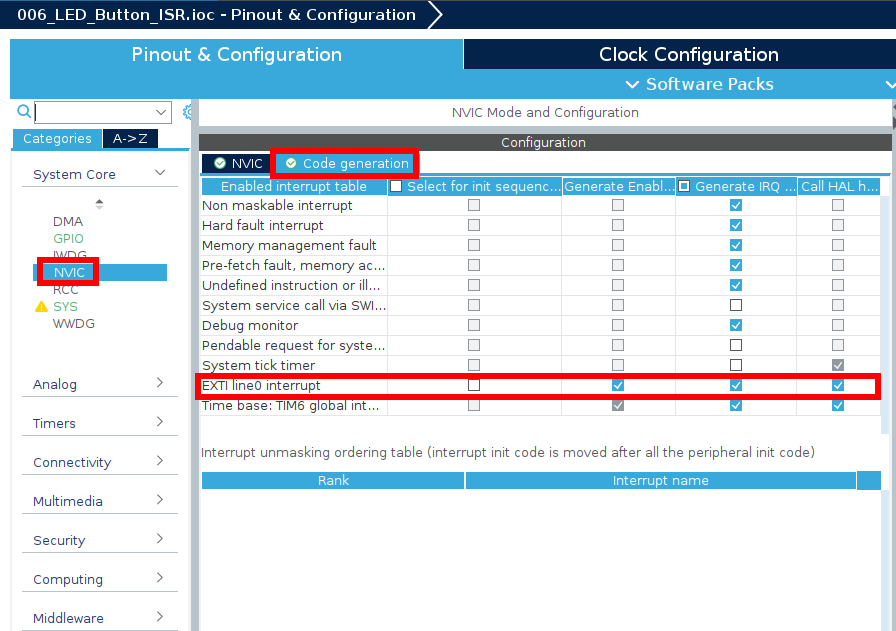
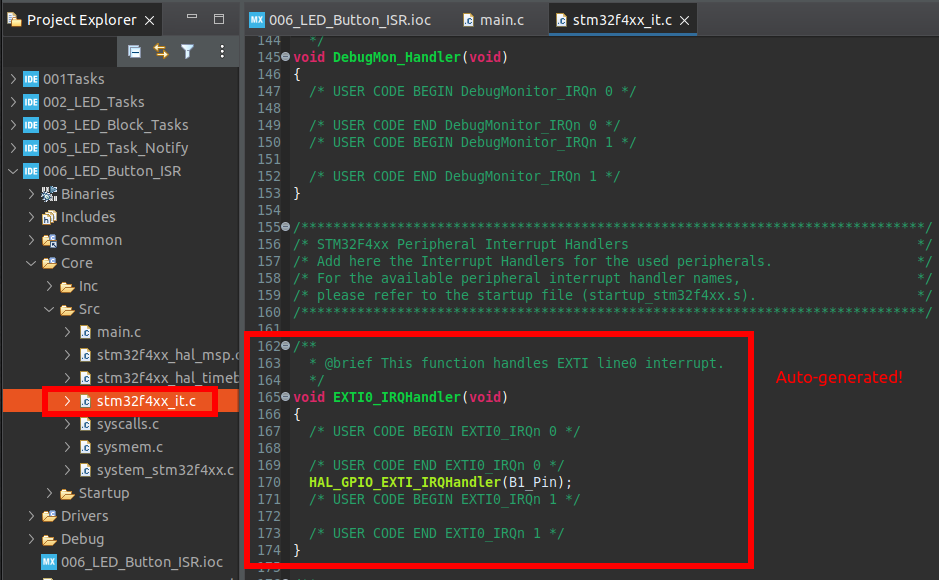
button_interrupt_handler()fromEXTI0_IRQHandler()shown in the file above and implement it inmain.c. (Make sure to declare this function asexternin the file.)Also, clear the pending bit for
GPIO_PIN_0.xxxxxxxxxx121/* stm32f4xx_it.c */2...3void EXTI0_IRQHandler(void)4{5/* USER CODE BEGIN EXTI0_IRQn 0 */6button_interrupt_handler();78// clear EXTI 0 pending bit in the exti pending register9HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);10/* USER CODE END EXTI0_IRQn 0 */11...12}In my case,
HAL_GPIO_EXTI_IRQHandler(B1_Pin)was already there generated in the code as shown in the snapshot above. (B1_Pinis defined asGPIO_PIN_0)Implement
button_interrupt_handler().xxxxxxxxxx131/* main.c */2...34/* USER CODE BEGIN 4 */56void button_interrupt_handler(void)7{8traceISR_ENTER(); // to monitor the entry of the ISR from the SEGGER SystemView9xTaskNotifyFromISR(next_task_handle, 0, eNoAction, NULL);10traceISR_EXIT();11}1213...Update
led_green_handler(). Here, the shared variablenext_task_handleis also shared with the ISR which is not a user task, so synchronizing the access to this variable usingvTaskSuspendAll()/vTaskResumeAll()will not work!Use
portENTER_CRITICAL()/portEXIT_CRITICAL()which is implemented asvPortEnterCritical()inport.cinstead. This will disable interrupts. However, in general, disabling interrupts is not recommended. If this is the case, use mutex or semaphore instead.xxxxxxxxxx281/* main.c */2...3static void led_green_task_handler(void *parameters)4{5BaseType_t status;67while (1)8{9SEGGER_SYSVIEW_PrintfTarget("Toggling green LED");10HAL_GPIO_TogglePin(GPIOD, LED_GREEN_PIN);1112// If there's no notifications pending, go to the BLOCKED state for 1 sec13// until it receives a notification.14status = xTaskNotifyWait(0, 0, NULL, pdMS_TO_TICKS(1000));1516if (status == pdTRUE)17{18// If there was a notification (i.e., User has pressed the button),19// update the 'next_task_handle', turn the LED on, and delete itself.20portENTER_CRITICAL(); // Synchronization begins21next_task_handle = led_orange_task_handle;22HAL_GPIO_WritePin(GPIOD, LED_GREEN_PIN, GPIO_PIN_SET);23SEGGER_SYSVIEW_PrintfTarget("Delete Green LED Task");24portEXIT_CRITICAL(); // Synchronization ends25vTaskDelete(NULL);26}27}28}vPortEnterCritical()callsportDISABLE_INTERRUPTS()which disables all the interrupts with priority values [configMAX_SYSCALL_INTERRUPT_PRIORITY, 0xF], [0x5, 0xF] in our case. Interrupts with the priority values within range [0x0, 0x4] are not affected. Note that any interrupt handler that is of higher priority (i.e., lower priority value) thanconfigMAX_SYSCALL_INTERRUPT_PRIORITYcannot use the FreeRTOS API within it.xxxxxxxxxx181/* Project/Common/ThirdParty/FreeRTOS/portable/GCC/ARM_CM4F/portmacro.h */2...34...56portFORCE_INLINE static void vPortRaiseBASEPRI( void )7{8uint32_t ulNewBASEPRI;910__asm volatile11(12" mov %0, %1 \n"\13" msr basepri, %0 \n"\14" isb \n"\15" dsb \n"\16: "=r" ( ulNewBASEPRI ) : "i" ( configMAX_SYSCALL_INTERRUPT_PRIORITY ) : "memory"17);18}Since the interrupt handlers used for the context switching (e.g.,
PendSVHandler()) has the lowest priority (i.e., highest priority value), it will also be disabled by the callportDISABLE_INTERRUPTS.If you are copying the
main.cfrom the previous exercise, make sure to remove everything related tobutton_handlersince we are no longer using that task to send notification upon button press. We are using ISR in this exercise.Analyze using SEGGER SystemView.
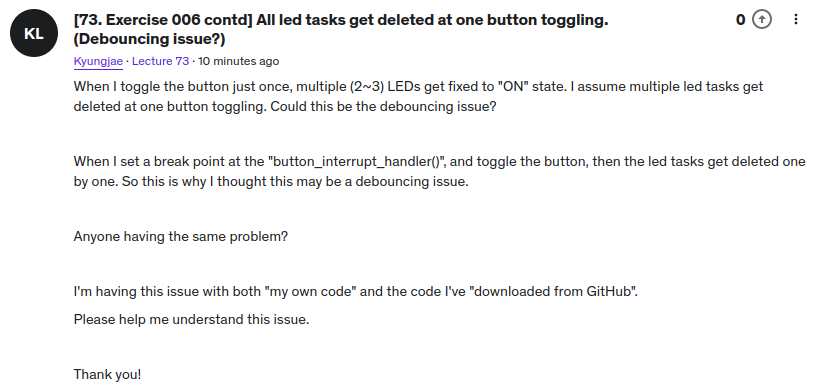
I faced a problem with this exercise. Left the question on the Q&A board.
Strange! This issue did not appear on the 2nd implementation.
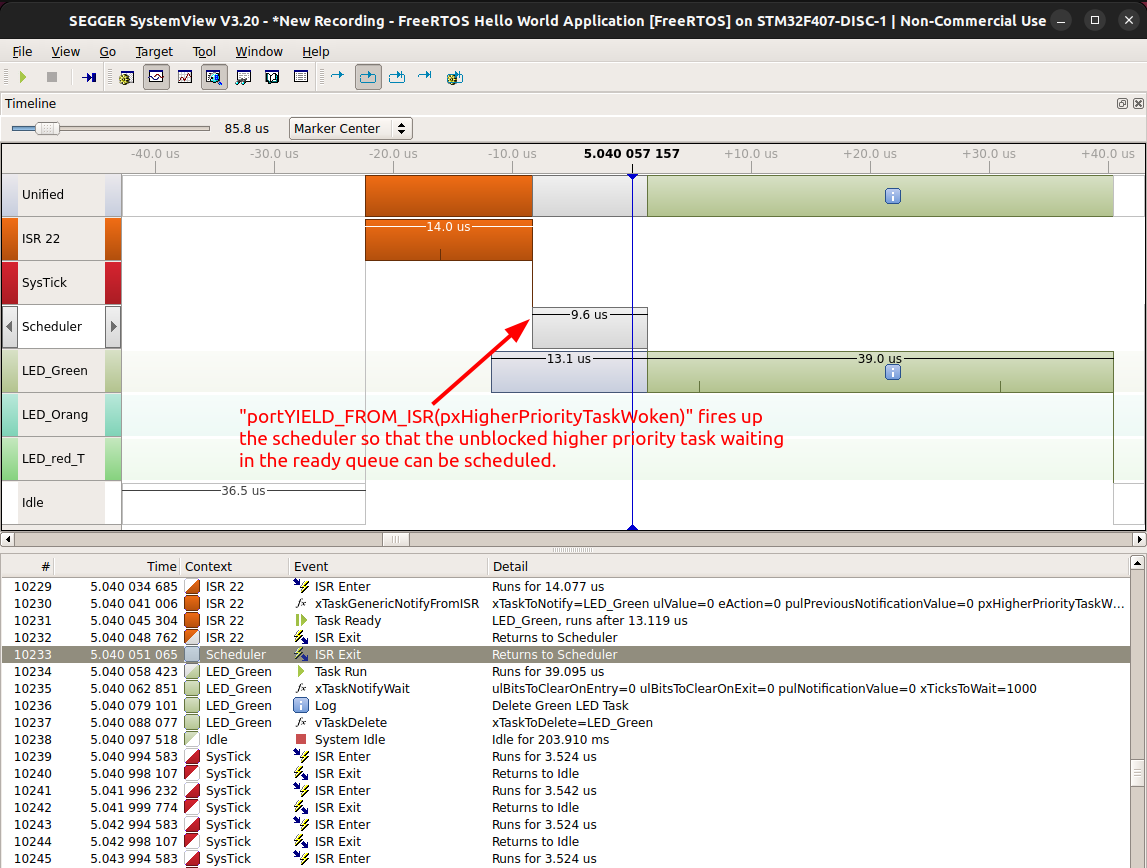
SEGGER SystemView Analysis
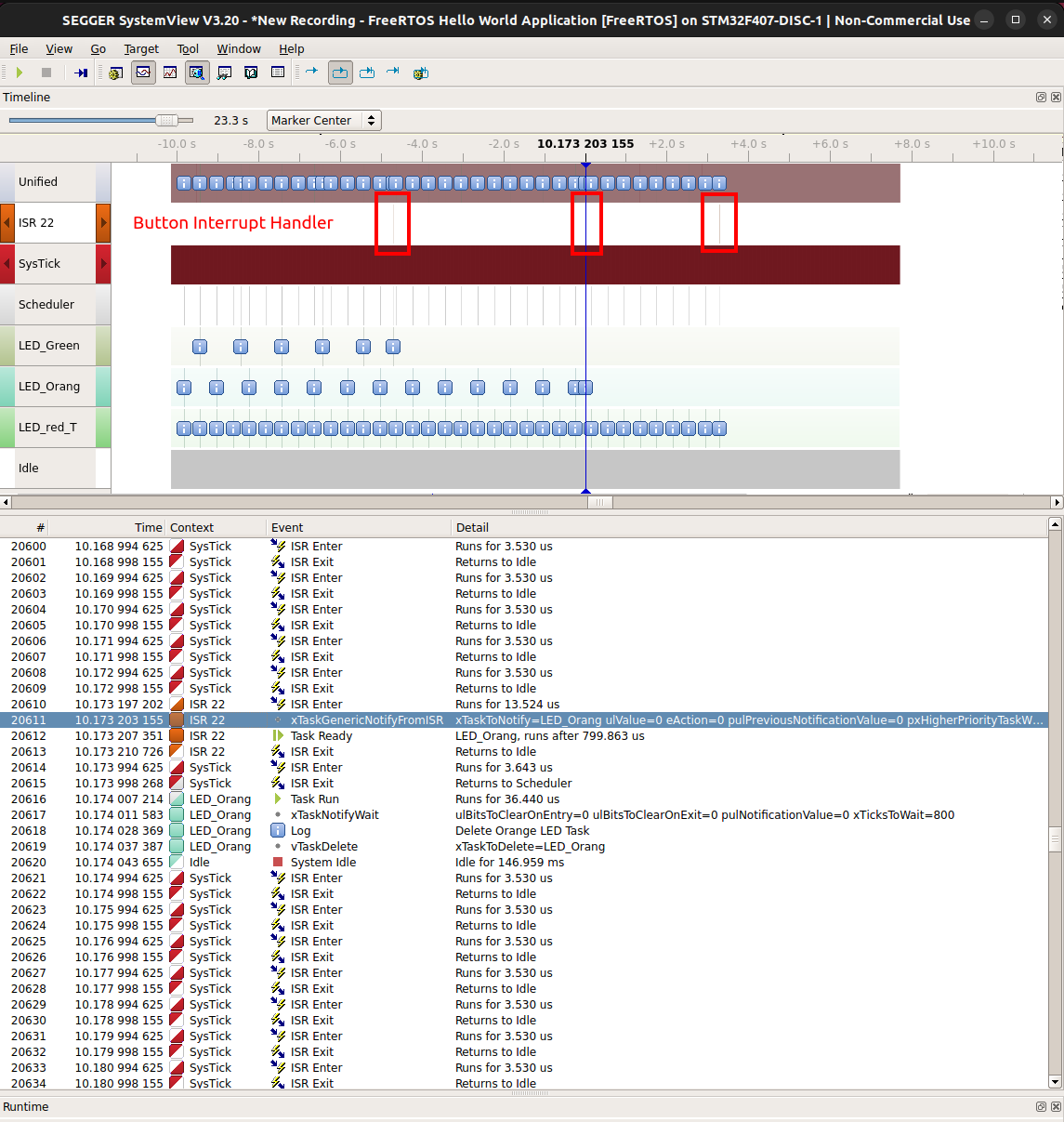
In
ISR 2222 means the ISR number.
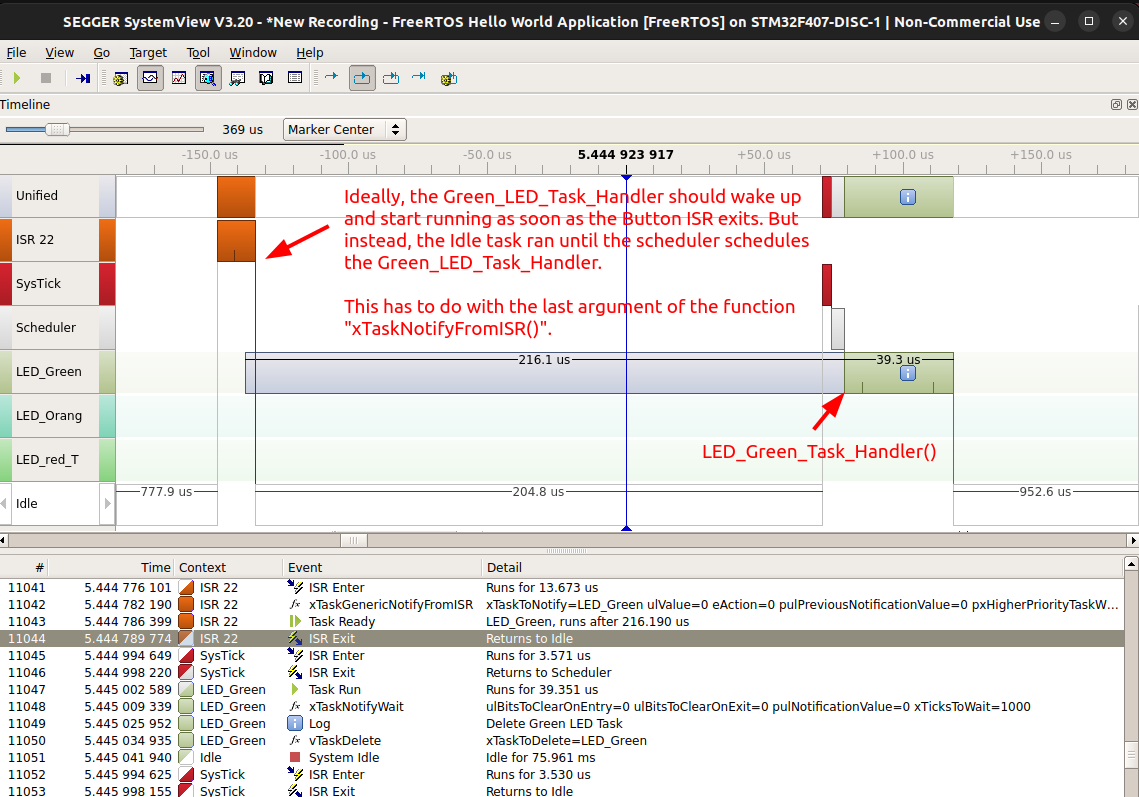
Solution:
xxxxxxxxxx221/* main.c */2...3void button_interrupt_handler(void)4{5BaseType_t pxHigherPriorityTaskWoken = pdFALSE; // Must be initialized to 06traceISR_ENTER(); // To monitor the entry of the ISR from the SEGGER SystemView8xTaskNotifyFromISR(next_task_handle, 0, eNoAction, &pxHigherPriorityTaskWoken);9// xTaskNotifyFromISR() will set *pxHigherPriorityTaskWoken to pdTRUE10// if sending the notification caused a task to unblock, and the unblocked11// task has a priority higher than the currently running task.12//13// If xTaskNotifyFromISR() sets this value to pdTRUE then a context switch14// should be requested before the interrupt is exited.15//16// pxHigherPriorityTaskWoken is an optional parameter and can be set to NULL.17// Once the ISR exits, the macro below makes the higher priority task unblocked19// to resume on the CPU.20portYIELD_FROM_ISR(pxHigherPriorityTaskWoken);21traceISR_EXIT();22}
Exercise: Task Priority (07_Task_Priority)
Write an application that creates 2 tasks:
Task-1
Priority value: 2
Continuous task
Toggles the red LED with 100 ms ON/OFF duration
Task-2
Priority value: 3
Continuous task
Toggles the green LED with 1 s ON/OFF duration
When the user button is pressed, the priority of the tasks should be exchanged. (i.e., Task-1's priority must be reconfigured for Task-2's priority and vice versa.)
Check the following 2 APIs that helps reconfiguring the FreeRTOS value of a task.
uxTaskPriorityGet()vTaskPrioritySet()
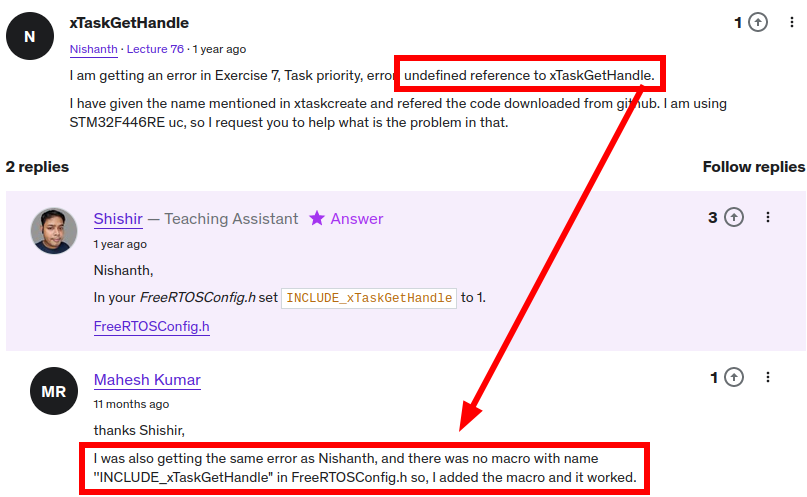
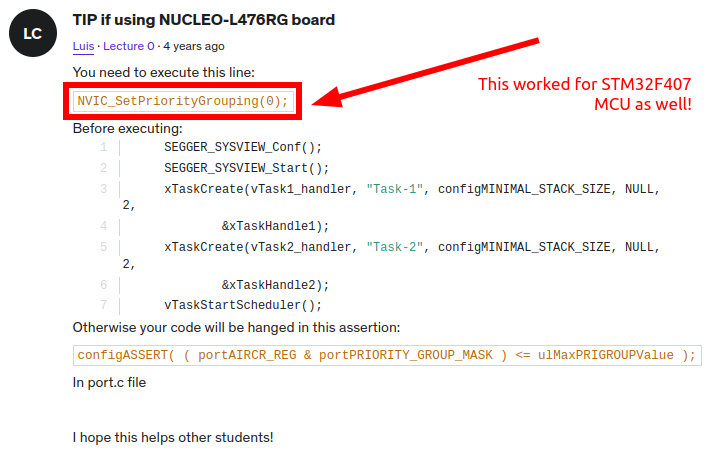
Error fixes!
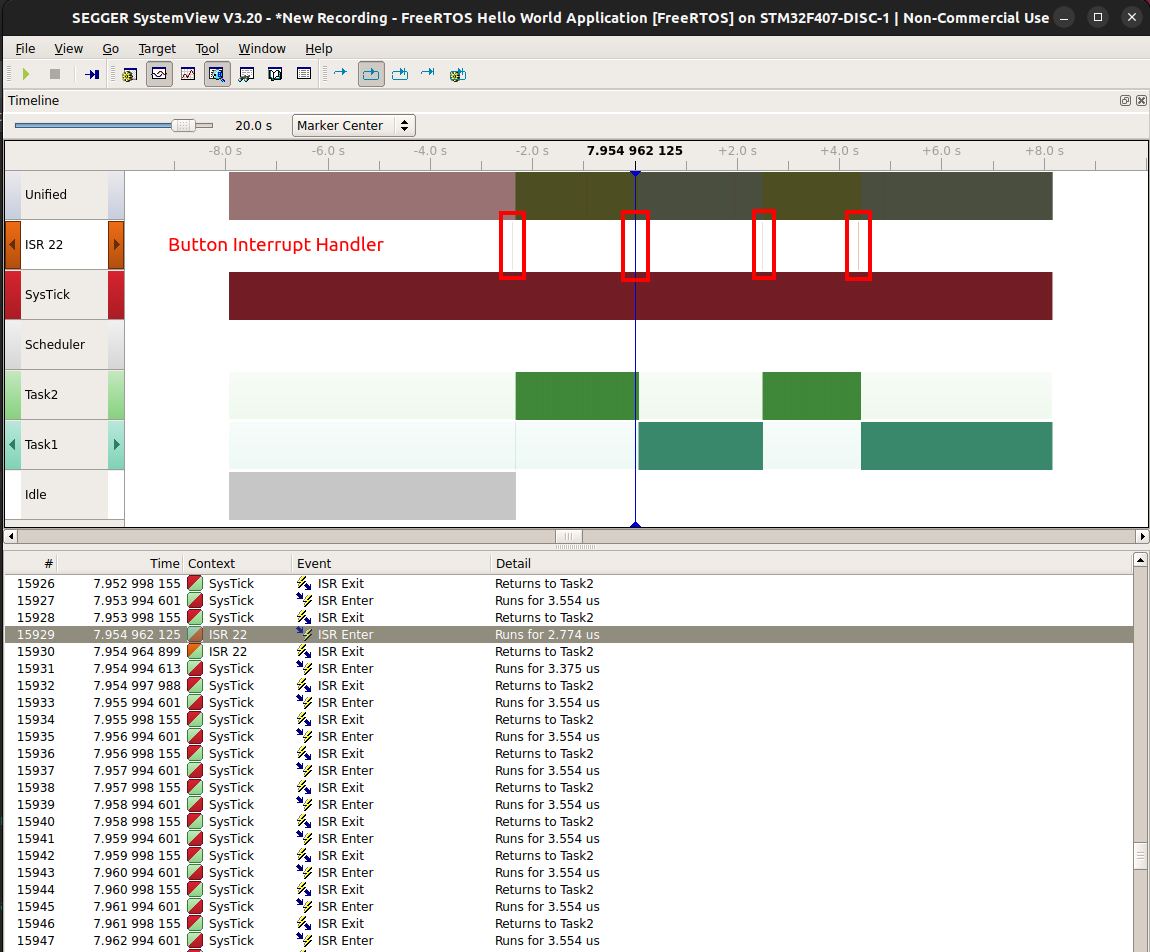
SEGGER SystemView Analysis
Review Questions
Lets say the Task-1 is executing on the CPU whose Priority is 3 . Now processor hits with an interrupt of the USART Tx whose priority is 2 , will Task1 be preempted? (Assume lower priority value = lower priority)
Lets say USART TX interrupt is being serviced by the processor whose priority is 2 , now another interrupt is pended whose priority is 5, Do you think processor will preempt the USART TX ISR to attend the ISR of newly pended interrupt ? in other words do you think interrupt nesting will happen? (Assume lower priority value = lower priority)
Lets say in freeRTOS , Task1( priority )= 5 is currently executing on the CPU, if Task2(priority)= 6 unblocks due to some reason, will context switch take place to task 2 immediately or task 2 should wait until the next tick interrupt?
In which processor mode FreeRTOS tasks will be executing in the ARM Cortex-Mx processor?
If 6 bits are implemented in the priority register of the MCU, then how many interrupts levels are available? What is the highest priority level and lowest priority level?
Does having more priority levels affect RAM usage of the MCU?
References
Nayak, K. (2022). Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging [Video file]. Retrieved from https://www.udemy.com/course/mastering-rtos-hands-on-with-freertos-arduino-and-stm32fx/