Home | Projects | Notes > Real-Time Operating Systems (RTOS) > Exercise: Toggle LEDs (02_LED_Tasks)
Exercise: Toggle LEDs (02_LED_Tasks)
Problem Statement
Toggle the three LEDs of the STM32F407 Discovery board with the frequency as defined below:
LED_GREEN (Task1) - 1000 ms
LED_ORANGE (Task2) - 800 ms
LED_RED (Task3) - 400 ms
Create 3 FreeRTOS tasks of the same priority to handle three different LEDs.
Each task will NOT interfere with one another. (No shared resources)
Since this is a single-core system, "parallel" processing will be impossible to achieve. Just implement it in a time-sharing fashion!
Design Model
All user level code (i.e., tasks) runs in Thread Mode of the processor.
CPU time-sharing is achieved by the scheduler.
Task management is required and provided by RTOS kernel.
Using priority among tasks can achieve prioritized task management.
Can achieve low power (CPU is not always engaged; run a task and stay idle for some time...)
Project Setup
Create an STM32 project.
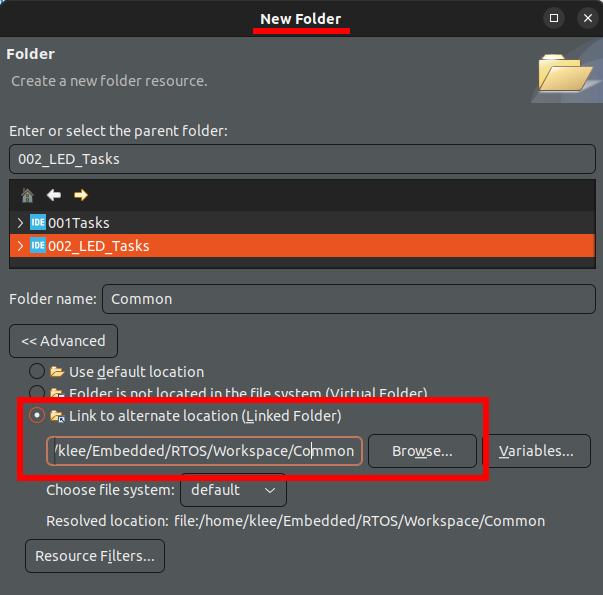
Instead of integrating the third party tools every time you create a project, you can create a common folder to all projects.
Create a
Workspace/Common/folder, and copy theProject/ThirdParty/folder (which we created in the previous section when creating the first project) into theWorkspace/Common/folder.Link it to the project. (Not copy, but link!)
Common
Include paths (Project
GNU C (Compiler include paths settings)
Workspace/Common/ThirdPary/FreeRTOS/includeWorkspace/Common/ThirdPary/FreeRTOS/portable/GCC/ARM_CM4FWorkspace/Common/ThirdPary/SEGGER/ConfigWorkspace/Common/ThirdPary/SEGGER/OSWorkspace/Common/ThirdPary/SEGGER/SEGGER
Assembly
Workspace/Common/ThirdPary/SEGGER/ConfigWorkspace/Common/ThirdPary/SEGGER/SEGGER
[!] Note: Don't forget to click "Apply" after adding new include paths.
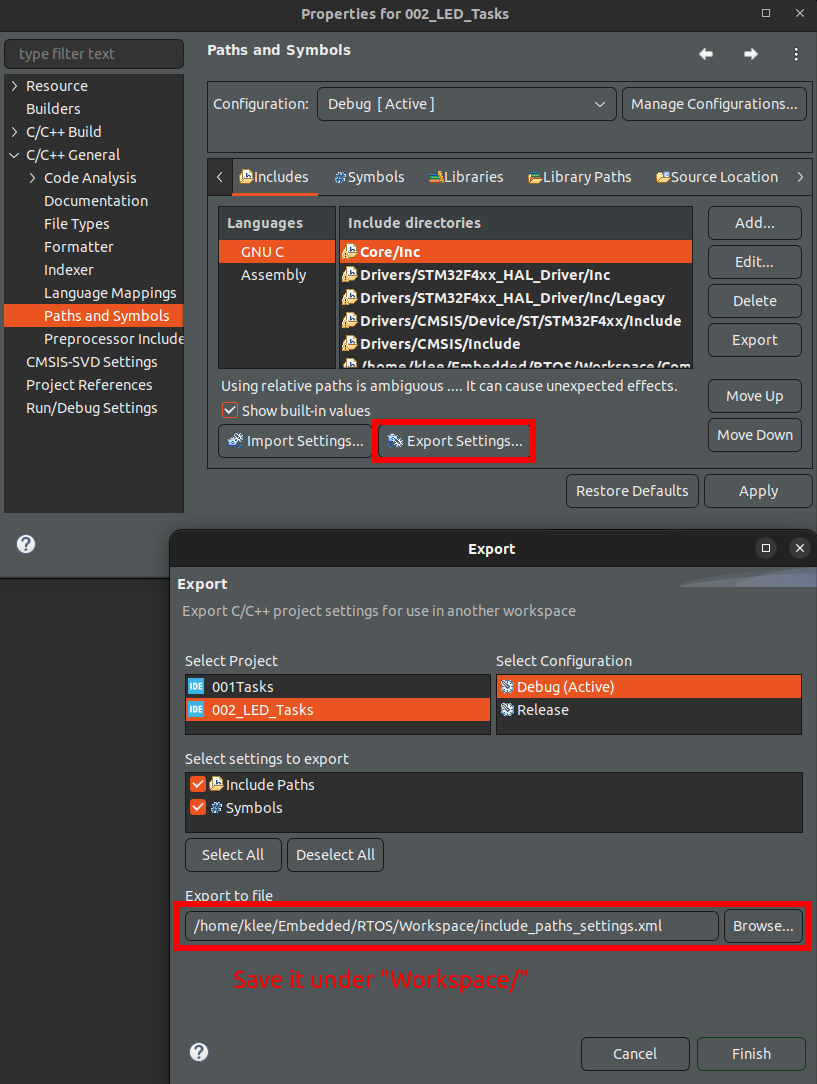
If this include paths setting is to be used over and over again with other projects, you can export and import this setting, which will save some time.
To export the include paths settings, do the following and export the settings for BOTH "GNU C" and "Assembly" using the same
.xmlfile. (You can open the.xmlfile and check if all the necessary include paths are there.)
Implementation
Create three tasks and implement each task function.
xxxxxxxxxx71/* main.h */2...3/* USER CODE BEGIN Private defines */4567/* USER CODE END Private defines */xxxxxxxxxx1041/* main.c */2...3/* Private includes ----------------------------------------------------------*/4/* USER CODE BEGIN Includes */567/* USER CODE END Includes */8...9/* USER CODE BEGIN PV */1011/* USER CODE END PV */12...13/* USER CODE BEGIN PFP */14static void led_green_task_handler(void *parameters);15static void led_orange_task_handler(void *parameters);16static void led_red_task_handler(void *parameters);17/* USER CODE END PFP */18...1920int main(void)21{22/* USER CODE BEGIN 1 */23TaskHandle_t led_green_task_handle;24TaskHandle_t led_orange_task_handle;25TaskHandle_t led_red_task_handle;2627BaseType_t status; // Stores return value of xTaskCreate()28/* USER CODE END 1 */2930...3132/* USER CODE BEGIN 2 */3334// Enable the cycle counter35DWT_CTRL |= (0x1 << 0); // Set SYCCNTENA bit of DWT_CYCCNT register3637// Initialize UART with desired baudrate for SEGGER SystemView with UART-based recording38SEGGER_UART_init(500000); // Comment this line out if you are not using SEGGER SystemView3940// Start the SEGGER SystemView recording of events41SEGGER_SYSVIEW_Conf(); // Comment this line out if you are not using SEGGER SystemView42//SEGGER_SYSVIEW_Start(); // This function will be called from ThirdParty/Rec/segger_uart.c4344// Create LED_Green_Task and make sure that the task creation was successful45status = xTaskCreate(led_green_task_handler, "LED_Green_Task", 200, NULL, 2, &led_green_task_handle);46configASSERT(status == pdPASS);4748// Create LED_Orange_Task and make sure that the task creation was successful49status = xTaskCreate(led_orange_task_handler, "LED_Orange_Task", 200, NULL, 2, &led_orange_task_handle);50configASSERT(status == pdPASS);5152// Create LED_Red_Task and make sure that the task creation was successful53status = xTaskCreate(led_red_task_handler, "LED_red_Task", 200, NULL, 2, &led_red_task_handle);54configASSERT(status == pdPASS);5556// Start FreeRTOS scheduler57// vTaskStartScheduler() never returns unless there's a problem launching scheduler58vTaskStartScheduler();5960// This line will only be reached if the kernel could not be started because there was61// not enough FreeRTOS heap to create the idle task or the timer task.6263/* USER CODE END 2 */64...65}6667...6869/* USER CODE BEGIN 4 */7071static void led_green_task_handler(void *parameters)72{73while (1)74{75SEGGER_SYSVIEW_PrintfTarget("Toggling green LED");76HAL_GPIO_TogglePin(GPIOD, LED_GREEN_PIN);77HAL_DELAY(1000); // Blocking delay (Keeps the processor engaged in a while loop)78// Later will be replaced by the non-blocking delay.79}80}8182static void led_orange_task_handler(void *parameters)83{84while (1)85{86SEGGER_SYSVIEW_PrintfTarget("Toggling orange LED");87HAL_GPIO_TogglePin(GPIOD, LED_ORANGE_PIN);88HAL_DELAY(800); // Blocking delay (Keeps the processor engaged in a while loop)89// Later will be replaced by the non-blocking delay.90}91}9293static void led_red_task_handler(void *parameters)94{95while (1)96{97SEGGER_SYSVIEW_PrintfTarget("Toggling red LED");98HAL_GPIO_TogglePin(GPIOD, LED_RED_PIN);99HAL_DELAY(400); // Blocking delay (Keeps the processor engaged in a while loop)100// Later will be replaced by the non-blocking delay.101}102}103104/* USER CODE END 4 */GPIO settings are automatically done by the CubeIDE. These settings can be found in the
MX_GPIO_Init()function. (Also, you can check the "Device Configuartion ToolTo see their implementations, see
Project/Drivers/STM32F4xx_HAL_Driver/Src/stm32f4xx_hal_gpio.c. (Ctrl + O will show you the list of public APIs defined in the file.)Before building the project, make sure to do the following settings:
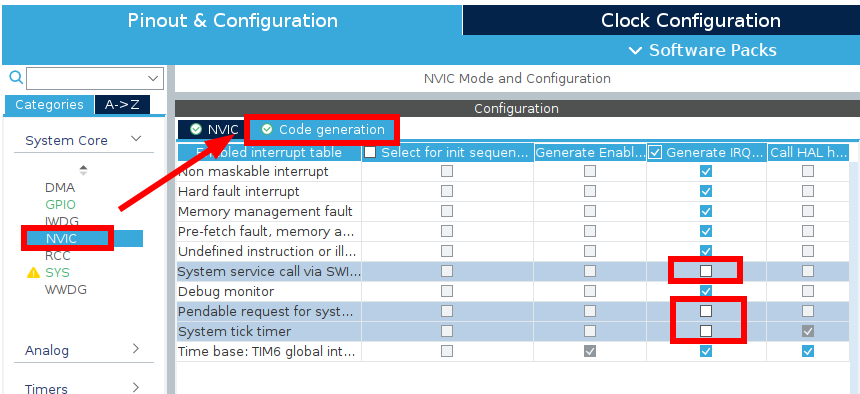
Select the time base for STM32 HAL something other than the SysTick. (SysTick timer will be used for the FreeRTOS tick)
Do the priority group setting.
See, Timebase Source Selection section in the Creating FreeRTOS Project notes for the detailed steps for above 2 settings.
Also, disable the code generation of SysTick, SVC, and PendSV handlers.
Save
Call
vInitPrioGroupValue()fromHAL_MspInit()in the filestm32f4xx_hal_msp.c. For this to work,FreeRTOS.hmust be included.xxxxxxxxxx151/* stm32f4xx_hal_msp.c */2...3/* Includes ------------------------------------------------------------------*/4/* USER CODE BEGIN Includes */56/* USER CODE END Includes */78void HAL_MspInit(void)9{10...11/* USER CODE BEGIN MspInit 1 */12vInitPrioGroupValue();13/* USER CODE END MspInit 1 */14...15}Copy
Workspace/Common/ThirdParty/FreeRTOS/FreeRTOSConfig.htoProject/Inc/sinceFreeRTOSConfig.his a project-specific configuration file that cannot be shared among multiple projects. And, delete the original one.Build and test it on the target.
Make sure in the
Project/Inc/FreeRTOSConfig.h, preemption is turned on#define configUSE_PREEMPTION 1.
Testing
Turn on SEGGER SystemView UART-based recording.
In the file
Project/Common/ThirdParty/SEGGER/Config/SEGGER_SYSVIEW_Conf.h, make sure#define SEGGER_UART_REC 1.In the
Project/Src/main.cadd the following lines in the main function:SEGGER_UART_init(500000);,SEGGER_SYSVIEW_Conf();(Also, declare these function asextern.)xxxxxxxxxx131/* main.c */2...3int main(void)4{5...6SEGGER_UART_init(500000);78// Enable the CYCCNT counter9DWT_CTRL |= (1 << 0);1011SEGGER_SYSVIEW_Conf();12...13}
Since the UART recording calculates the Baudrate based on the
HCLKof 168 MHz, so change theHCLKfrequency to 168 MHz in the "Device Configuration Tool".In the
Project/Src/main.c, now uncommentSEGGER_SYSVIEW_PrintfTarget("Toggling green LED");lines in the task handlers.Connect the board to the host PC using the USB-to-Serial cable. (Now, the board should be connected to your PC via 2 cables.)
Open SEGGER SystemView and do the UART-based recording.
Notes
These three tasks are continuous tasks, meaning that even if the task has nothing to do, it still consumes the CPU clocks (in a loop) until it gets preempted. (You can see also from the CPU load window that the CPU has never been idle.) Very inefficient!
We'll improve it in the following sections by making CPU sleep when it's not needed thus minimizing the power consumption.
References
Nayak, K. (2022). Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging [Video file]. Retrieved from https://www.udemy.com/course/mastering-rtos-hands-on-with-freertos-arduino-and-stm32fx/