Home | Projects | Notes > Real-Time Operating Systems (RTOS) > FreeRTOS Scheduler Implementation
FreeRTOS Scheduler Implementation
FreeRTOS Scheduler Internals
In FreeRTOS the scheduler code is a combination of
FreeRTOS generic code (
tasks.c)vTaskStartScheduler()is a generic function for all architectures implemented intask.cof FreeRTOS kernel and used to start the RTOS scheduler.When this function is called, only the scheduler code is initialized and all the architecture specific interrupts will be activated.
It also creates the idle task and Timer Daemon task.
It calls
xPortStartScheduler()defined inport.cwhich does the architecture-specific initializations including:Configuration of the SysTick timer to issue interrupts at a desired rate (as configured in the config item
configTICK_RATE_HZinFreeRTOSConfig.h; 1000 means 1000 interrupts per second)Configuration of the priority for the PendSV and SysTick interrupts.
Starting the first task by executing the SVC instruction.
Architecture specific code (
port.c,portmacro.h)xPortStartScheduler()defined inport.cdoes the following architecture-specific initializations:Configuring the SysTick timer to issue interrupts at a desired rate.
Make the PendSV and SysTick the lowest priority interrupts.
Starting the very first task (
prvPortStartFirstTask()) by executing the SVC instruction.
FreeRTOS Kernel Interrupts that Implement the Scheduler (Architecture-specific)
When FreeRTOS runs on ARM Cortex-Mx processor based MCU, the following kernel interrupts defined in
port.care used to implement the scheduler.SVC Interrupt (
vPortSVCHandler()) - Used to launch the very first task (only called once!). Triggered by SVC instruction of ARM Cortex-M processor.PendSV Interrupt (
xPortPendSVHandler()) - Used to achieve the context switching between tasks. Triggered by pending the PendSV system exception of ARM Cortex-M processor.SysTick Interrupt (
xPortSysTickHandler()) - Used to implement the RTOS tick management. Triggered periodically at a desired rate by the SysTick timer of ARM Cortex-M processor.
If SysTick interrupt is used for some other purpose in your application, you may use any other available timer peripheral.
All interrupts are configured at the lowest possible interrupt priority.
RTOS Ticking (RTOS Tick ISR)
RTOS ticking is implemented using timer hardware of the MCU. e.g., SysTick timer in the case of ARM Cortex-Mx processor.
RTOS tick is necessary for the kernel to keep track of the time elapsed. (A global variable
xTickCountwhich gets incremented by one every tick is used.)One application is to wake up a task that has been sleeping for a certain amount of time. The task keeps track of the global tick count and compares it with the preset value.
Tick interrupt is triggered at the rate of
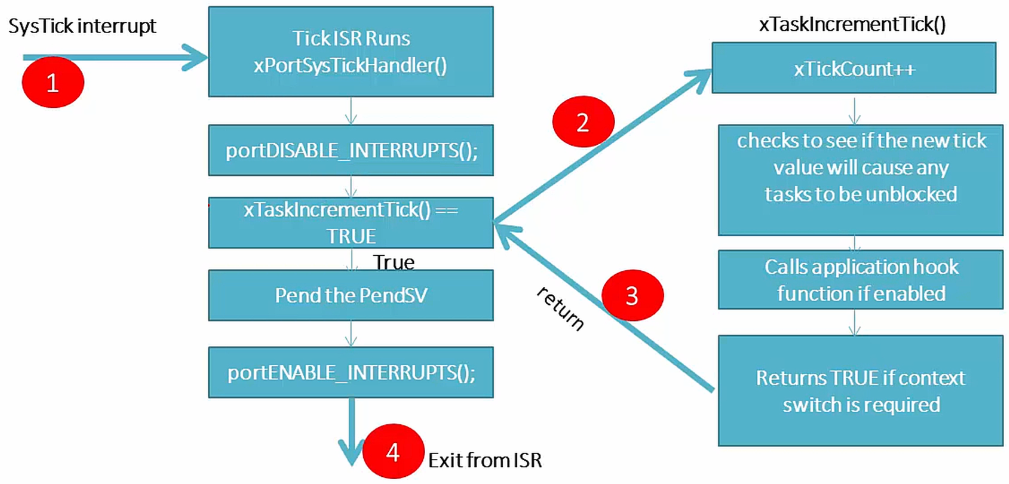
configTICK_RATE_HZdefined inFreeRTOSConfig.h.Each RTOS tick (timer tick interrupt) triggers the scheduler to perform context switching. The context switching occurs in the following process:
Upon the execution of the tick ISR
All the tasks in the Read state are scanned
The task to run next is determined
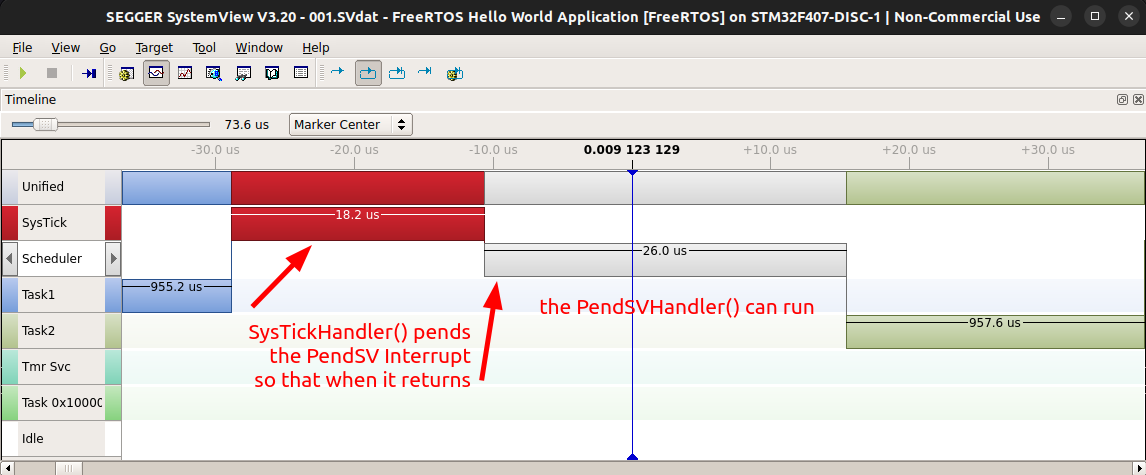
If found, context switching is triggered by pending the PendSV ISR
The PendSV handler takes care of the context switching
Where does the RTOS tick timer get configured?
xPortStartScheduler()(port.c) called byvTaskStartScheduler()(tasks.c).xPortStartScheduler()performs the following 3 important operations.Makes the PendSV and SysTick the lowest priority interrupts.
xxxxxxxxxx51/* port.c */23/* Make PendSV and SysTick the lowest priority interrupts. */4portNVIC_SHPR3_REG |= portNVIC_PENDSV_PRI;5portNVIC_SHPR3_REG |= portNVIC_SYSTICK_PRI;If you keep tracking the macros you will reach
xxxxxxxxxx41/* FreeRTOSConfig.h */23/* The lowest interrupt priority that can be used in a call to a "set priority" function. */415 is the lowest possible 4-bit priority value.
Enables the Systick timer interrupt and starts the timer.
xxxxxxxxxx31/* port.c */2/* Start the timer that generates the tick ISR. Interrupts are disabled here already. */3vPortSetupTimerInterrupt();Inside this function, the
configTICK_RATE_HZvalue will get loaded to the SysTick timer.xxxxxxxxxx51/* port.c */2/* Configure SysTick to interrupt at the requested rate. */3portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL;4portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT |5portNVIC_SYSTICK_ENABLE_BIT );L3: Load the value. (See The RTOS Tick Configuration section below to see how the load value is obtained.)
L4: Enable SysTick. This is where the down-counting gets started.
The RTOS Tick Configuration
In the current project setup:
configSYSTICK_CLOCK_HZis set toconfigCPU_CLK_HZIf
configCPU_CLK_HZ = 25000000(i.e., 25 MHz), andconfigTICK_RATE_HZ = 1000(i.e., 1000 Hz), thenportsSYSTICK_NVIC_LOAD_REG = (25000000 / 1000) - 1(i.e., 24999)The SysTick timer, when started, dounts down from 24999 to 0. It generates an interrupt when the count value reaches 0 and again reloads the load count value.
Therefore, 24999 is the SysTick load value required to generate interrupt for every 1 ms (1000 Hz).
You may see the
configCPU_CLK_HZset to different value (e.g., 16000000) initially, but this will be updated to the project's clock rate. The clock rates can be checked using the "Device Configuration Tool".
RTOS Tick ISR Summary
References
Nayak, K. (2022). Mastering RTOS: Hands on FreeRTOS and STM32Fx with Debugging [Video file]. Retrieved from https://www.udemy.com/course/mastering-rtos-hands-on-with-freertos-arduino-and-stm32fx/