Home | Projects | Notes > ARM Cortex-M3/M4 Processor > Fault Handling
Fault Handling
Fault
A fault is an exception generated by the processor to indicate an error. Faults are nothing but system exceptions.
Faults happen because of programmers handling processor by violating the design rules or may be due to interfaces with which the processor deals
Whenever a fault happens, internal processor registers will be updated to record the type of fault, the address of instruction at which the fault happened, and if an associated exception is enabled, the exception handler will be called by the processor
In the exception handler programmers may implement the code to report, resolve, or recover them from the fault.
e.g., if your code tries to divide a number by zero, then divide by 0 fault will be raised from the hardware, which will invoke UsageFault exception handler (if enabled). In the exception handler, you may make certain decisions to get rid of the problem, like closing the task, etc.
Most of the time, fault happens by programmer's code not adhering to the processor programming guidelines.
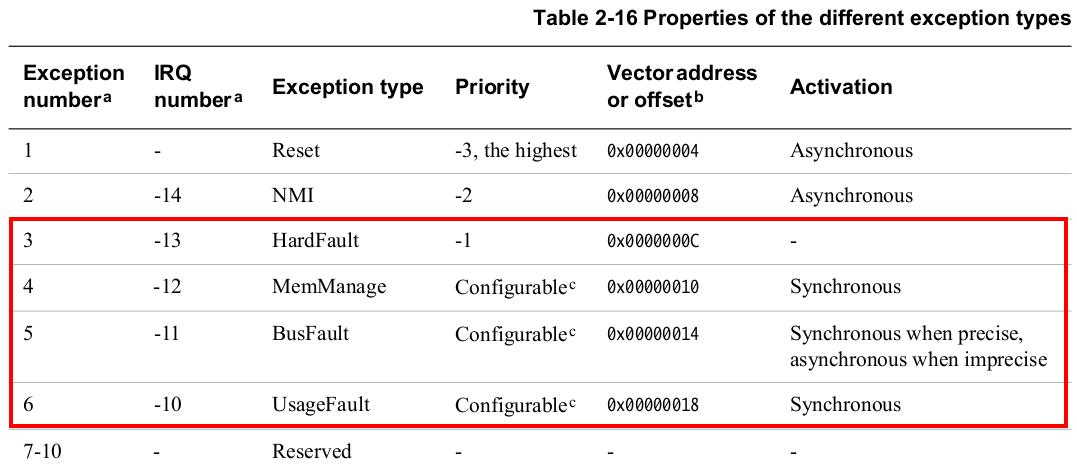
The followings are the system exceptions that are responsible for reporting faults.
HardFault exception - enabled by default, non-configurable priority (-1)
UsageFault exception - disabled by default, configurable priority (0 by default)
MemManage fault exception - disabled by default, configurable priority (0 by default)
BusFault exception - disabled by default, configurable priority (0 by default)
Causes of Faults:
Divide by zero (if enabled)
Execution of an undefined instruction
Attempt to execute code from memory region which is marked as eXecute Never (XN) to prevent code injection
MPU guarded memory region access violation by the code
Unaligned data access (if enabled)
Returning to thread mode keeping active interrupt alive (When an interrupt is active, it must be finished before the code can come back to the thread mode code.)
Bus error (e.g., no response from memory device (e.g., SDRAM) due to the device not being configured correctly, etc.)
Executing SVC instruction inside SVC handler or calling a function in SVC handler which eventually execute hidden SVC instruction
Debug monitor settings and related exceptions
HardFault Exception
A HardFault is an exception that occurs because of an error during exception processing, or because an exception cannot be managed by any other exception mechanism. It has 3rd highest fixed priority (-1) after Reset and NMI meaning it has higher priority than any exception with configurable priority.
Causes:
Escalation of a fault with configurable priority (MemManage, BusFault, UsageFault) that cannot be handled
Bus error returned during a vector fetch from the vector table
Execution of break point instruction when both halt mode and debug mode is disabled
Executing SVC instruction inside SVC handler
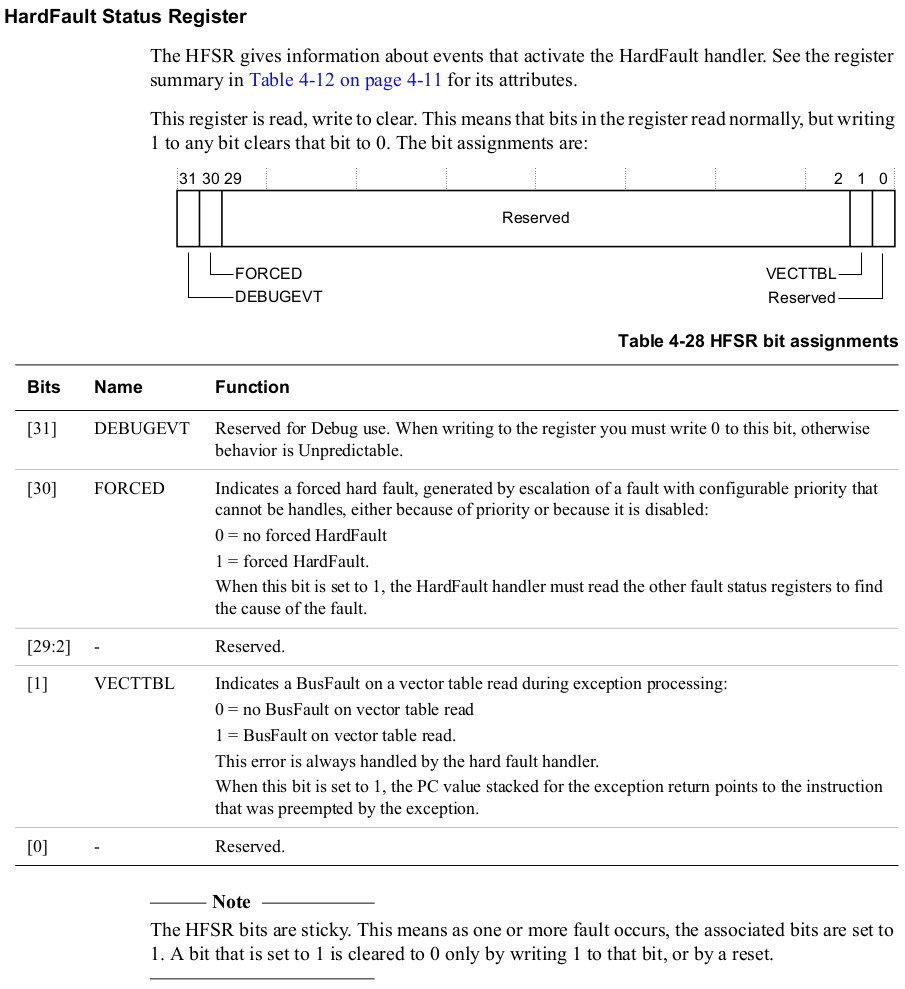
HardFault Status Register (Generic User Guide)
MemManage Exception
MemManage is a configurable fault exception. (Disabled by default).
MemManage can be enabled by configuring the processor register System Handler Control and State Register (SHCSR) - bit[16]. This register is part of System Control Block (SCB).
When MemManage fault happens MemManage fault exception handler will be executed by the processor.
Priority of this fault exception is configurable.
Causes:
As its name indicates this fault exception is triggered when memory access violation is detected during read/write operations (access permission by the processor or MPU)
Unprivileged thread mode code (such as user application or RTOS task) tries to access a memory region which is marked as "privileged access only" by the MPU
Writing to memory region which are marked as read-only by the MPU
This fault can also be triggered when trying to execute program code from "peripheral" memory regions. Peripheral memory regions are marked as eXecute Never (XN) regions by the processor design to avoid code injection attacks through peripherals.
BusFault Exception
BusFault is a configurable fault exception. (Disabled by default).
BusFault can be enabled by configuring the processor register System Handler Control and State Register (SHCSR) - bit[17].
When BusFault happens, the processor executes BusFault exception handler
The priority of this fault exception is configurable
Causes:
Due to error response returned by the processor bus interfaces during access to memory devices
During instruction fetch
During data read/write to memory devices
If bus error happens during vector fetch, it will be escalated to a HardFault even if BusFault is enabled
Memory device sends error response when the processor bus interface tries to access invalid or restricted memory locations which could generate a BusFault
When the device is not ready to accept memory transfer
You may encounter such issues when you play with external memories such as SDRAM connected via DRAM controllers
Unprivileged access to the private peripheral bus (registers)
e.g., A Thread mode code running with Unprivileged access level trying to configure an NVIC register
UsageFault Exception
UsageFault is a configurable fault exception. (Disabled by default).
UsageFault can be enabled by configuring the processor register System Handler Control and State Register (SHCSR) - bit[18].
When UsageFault happens, the processor executes UsageFault exception handler
The priority of this fault exception is configurable
Causes:
Execution of undefined instruction (e.g., Cortex M4 supports only Thumb ISA, so executing any instruction outside this ISA (e.g., ARM ISA) would result in a fault)
Executing floating-point instruction keeping floating-point unit disabled
Trying to switch to ARM state to execute ARM ISA instructions. The T bit of the processor decides ARM state or Thumb state. For Cortex M it should be maintained to 1. Making T bit 0 (may happen during function call using function pointers whose 0th bit is not maintained as 1) would result in a fault
Trying to return to thread mode when an exception/interrupt is still active
Unaligned memory access with multiple load or multiple store instructions
Attempt to divide by zero (if enabled, divide by zero results in zero by default)
For all unaligned data access from memory (only if enabled, otherwise Cortex M supports unaligned data access)
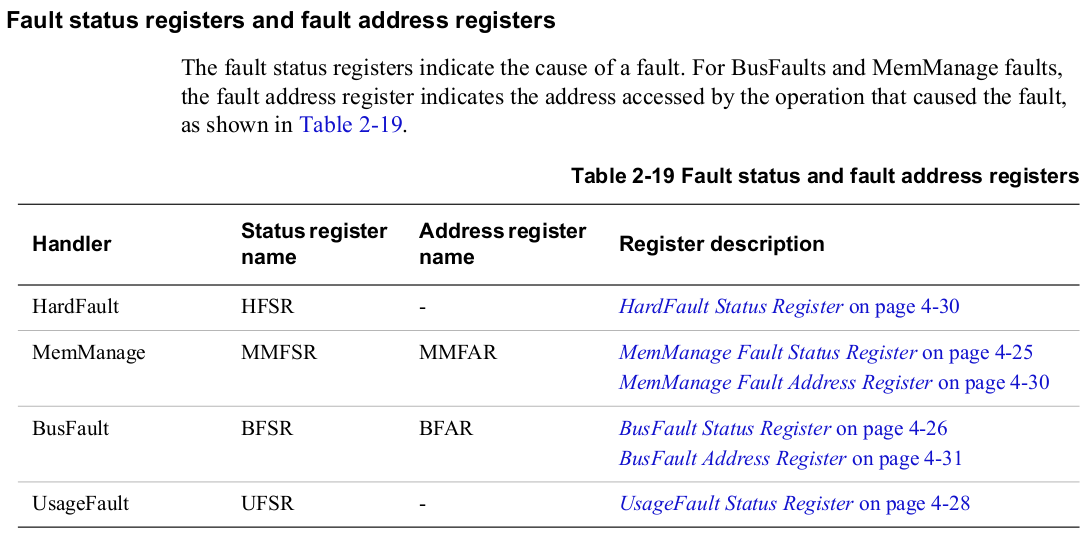
Fault Status and Address Information
When a fault happens, inside the fault handler, you can check a couple of fault status and address information registers to get more details about the fault and the instruction address at which the fault happened. This will be helpful during debugging.
Error Reporting when Fault Happens
Implement the handler which takes some remedial actions
Implement a user callback to report errors
Reset the microcontroller/processor
For an OS environment, the task that triggered the fault can be terminated and restarted
Report the fault status register and fault address register values
Report additional information of stack frame through debug interface such as
printf()See Stack Frame Analysis Using
__attribute__((naked))Function for more information.
Exercise
Write a program to enable all configurable fault exceptions, implement the fault exception handlers and cause the fault by the following method:
Execute an undefined instruction
Divide by zero
Try executing instruction from peripheral region
Executing SVC inside the SVC handler
Executing SVC instruction inside the interrupt handler whose priority is same or lesser than SVC handler
References
Nayak, K. (2022). Embedded Systems Programming on ARM Cortex-M3/M4 Processor [Video file]. Retrieved from https://www.udemy.com/course/embedded-system-programming-on-arm-cortex-m3m4/